Inleiding
In deze post worden de drie onderstaande criteria behandeld. Ook de drie onderdelen waaraan voldaan moet worden voor de laatste sprint van CLE worden besproken. Verdere informatie is te vinden in de CLE-blogposts zelf waarnaar in de tekst zelf gelinkt wordt. (Woensdag 9 oktober tot en met woensdag 30 oktober.)
Heb je je voldoende ontwikkeld? Is feedback en feedforward opgepakt en omgezet naar acties.
Mijn ontwikkeling is door de gehele tekst van deze retrospective heen verwerkt, problemen, uitdagingen en oplossingen worden behandeld en uitgelegd hoe ik tot de oplossing ben gekomen. In de dagelijkse blogposts welke ook in deze blog geplaatst zijn zal er nog dieper ingegaan worden op specifieke gevallen. Door om te gaan met feedback van zowel studiegenoten als docenten van eerdere sprints en de opgedane kennis toe te passen ben ik weer verder gekomen met mijn eigen ontwikkelingen en heb ik deze kunnen toepassen tijdens dit project. Waar ik vooral veel van geleerd heb is het vooraf maken van een plan van aanpak; wat moet er gedaan gaan worden, wie doet wat en tussentijds overleggen en testen. Dat werkte erg fijn, waar ik tijdens het project achter kwam is dat onze deelproducten niet echt harde deadlines hadden waardoor je soms uitloopt en in de knoop komt met de te globale planning. Deze problemen heb ik wel bespreekbaar gemaakt binnen de groep en zo is er actie ondernomen om tijdens deze sprint toch nog binnen de gestelde tijd af te ronden door buiten de schooltijden om af te spreken en door te werken. Dit met een mooi resultaat.
Leerstrategie – Wat was je aanpak om nieuwe dingen te leren en wat was het resultaat? Wat kan beter of anders?
Omdat binnen dit project alles van de afgelopen twee sprints samen moet komen heeft dit voor- en nadelen. Het leuke hieraan is is dat ik alle kennis die ik tot nu toe heb opgedaan kan samenvoegen in een eindproduct. De aanpak hiervan was wel anders omdat ik voorheen wel in groepsverband heb gewerkt maar nu moet je echt met meerdere mensen in een team tot één eindproduct komen. Wat ik hier van geleerd heb is dat het belangrijk is om goed te overleggen met elkaar, elkaar te helpen en ook kennis te delen.
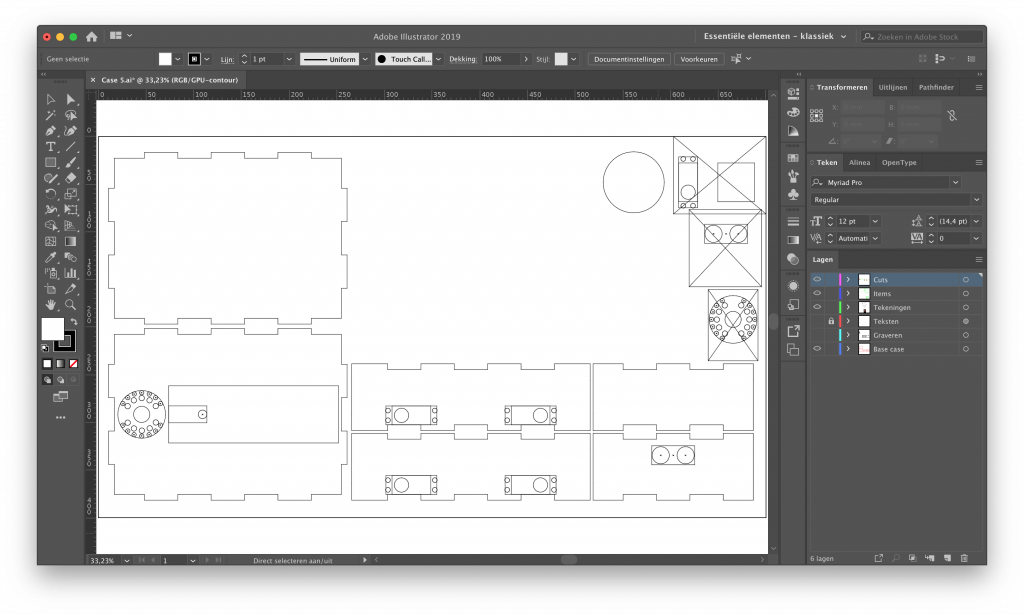
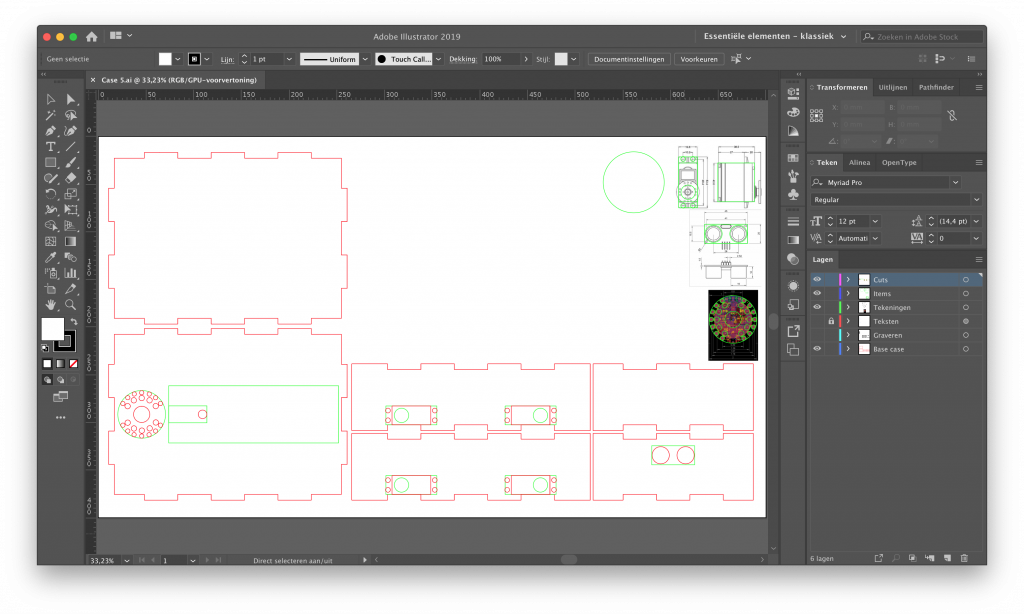
De aanpak wat het leren betreft; veel leer je door gewoon te doen. Ik heb geëxperimenteerd met de lasersnijder en gravuren maken. Omdat ik het belangrijk vind dat het eindproduct perfect past en stevig ontworpen is heb ik alles vooraf uitgemeten en berekend. Hier en daar loop je dan tegen wat probleempjes aan welke voorheen niet voorzien hebt. In de blog van vrijdag 18 oktober beschrijf ik een van de problemen en hoe ik dit opgelost hebt.
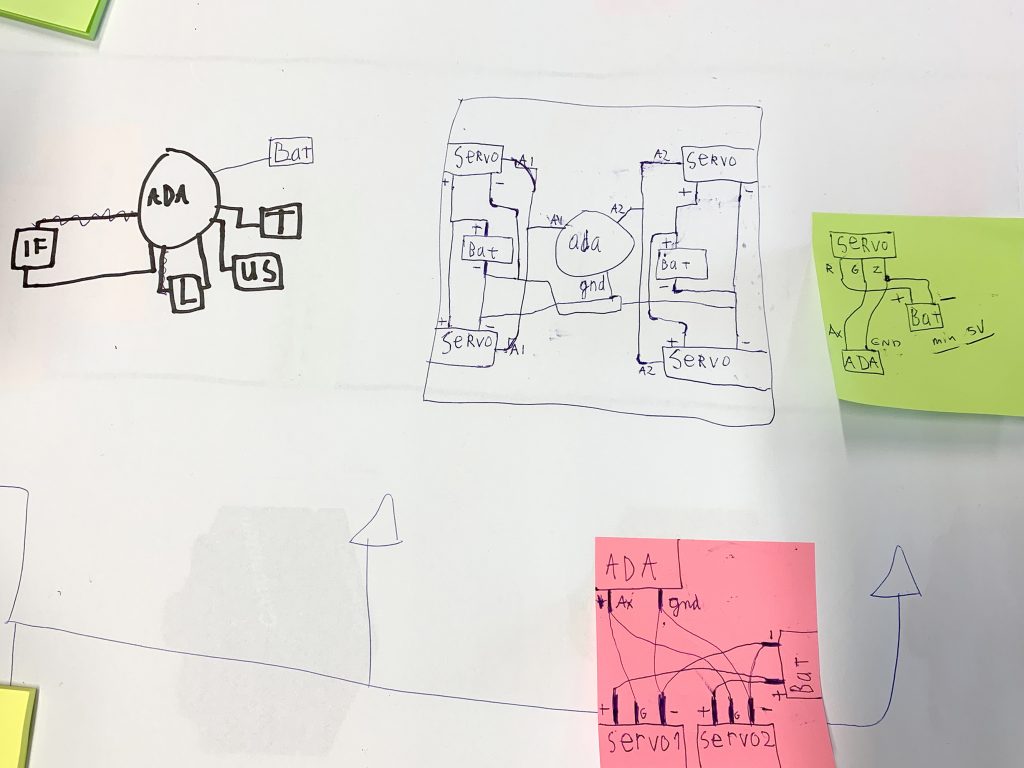
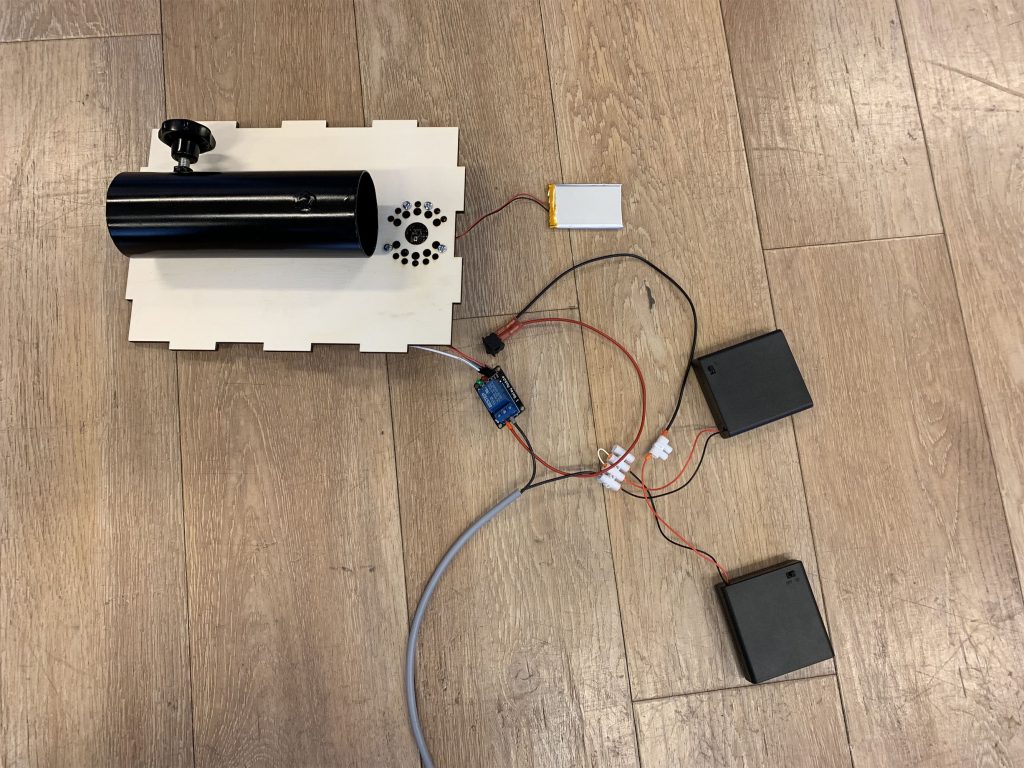
Ook heb ik veel geleerd van het sparren met teamgenoten en docenten. Een grote uitdaging is het veilig schakelen van het confetticannon wat op onze wagen komt te zitten. Omdat ik me bezig hou met de behuizing, bevestiging en deels de electronica controleer kwam ik hier al snel bij uit. De buizen welke afgevuurd gaan worden hebben een spanning van 12 Volt en 1 á 2 Ampère nodig, dit kan de Adafruit zelf nooit leveren omdat deze dan doorbrandt, iets wat ik in sprint 1 geleerd heb. David bood aan om een mosfet te gebruiken maar dit vertrouwde ik niet helemaal. Het hele proces en resultaat hiervan is te lezen in de blog van woensdag 16 oktober.
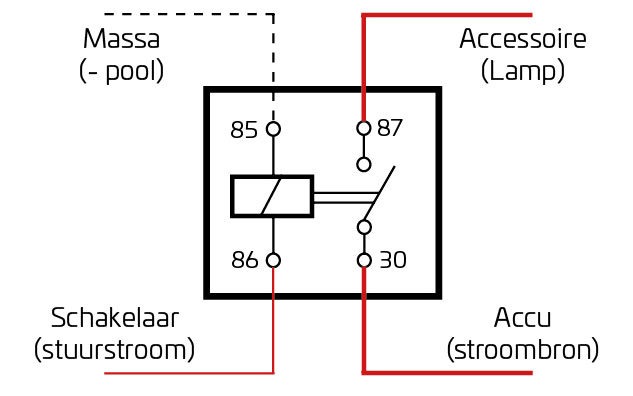
Woensdag 23 oktober ben ik bezig geweest met het testen van het kanon. Op papier werkt het allemaal zoals in de blog te lezen is. Wat ik nog onderzocht heb is hoe de relais precies aangesloten dient te worden aangezien er twee kanten aan de relais zijn met ieder drie aansluitingen. Door eenvoudig het type relais op te zoeken kom je uit bij schema’s waarin te zien is waarvoor welke pin dient. Aan de linkser zijde moet 3,3 Volt, digitaal uit en de ground vanaf de Adafruit worden aangesloten. Rechts sluit je in het midden de ground (min) van de voeding aan en de plus sluit je aan op een van de twee overgebleven aansluitingen. Ik wil dat het circuit standaard open staat zodat er geen stroom loopt waardoor het kanon niet af zal gaan. Theoretisch klopt dit allemaal, toch blijft het moment dat je het gaat testen spannend. Maar zoals in de video te zien is was het een succes.
Wat achteraf beter had gekund was het maken van een planning en deze te noteren. Aan het begin hadden we wel een globale taakverdeling gemaakt en wat in welke week af moest zijn. Maar aan het einde van het project merkte ik dat dit niet heel handig is omdat je niet visueel hebt wie bezig is met welke deelproducten en de status hiervan. Wel hebben we afgesproken om in de vakantie sowieso maandag nog samen te komen om door te werken en indien nodig de woensdag daarop ook nog.
Reflecteren – Je hebt op je Blog gereflecteerd op het werk dat je tijdens deze sprint uitgevoerd hebt, waardoor jouw ontwikkeling inzichtelijk geworden is.
Zoals door de blogs heen beschreven is ben ik verantwoordelijk geweest voor de behuizing van de robot zelf, van het digitale ontwerp tot aan de fysieke realisatie toe. Ook heb ik me bezig gehouden met de hardware fysiek te monteren en aan te sluiten op de Adafruit, elektronische berekeningen gemaakt, onderzoek gedaan naar de mogelijkheden en externe hardware aangesloten zoals relais en schakelaars. De ontwikkeling die ik doorgemaakt heb is verder in deze retrospective te lezen en in de CLE blogs welke hieronder vermeld staan.
CLE blogs onder elkaar
Woensdag 9 oktober
Maandag 14 oktober
Woensdag 16 oktober
Vrijdag 18 oktober
Maandag 21 oktober
Woensdag 23 oktober
Maandag 28 oktober
Dinsdag 29 oktober
Woensdag 30 oktober
Motivatie – Wat was je rol in het team, hoe heb je dat ingevuld en hoe heeft dit jouw leren beïnvloed?
Aangezien dit de derde sprint is met deze groep was het teamgevoel er al. Ik ken de kwaliteiten van iedereen en waar toe we in staat zijn. In het begin hebben we in groepsverband besloten wat het concept zou gaan worden. Wat mij vooral motiveert is de opdracht zelf. De combinatie van software en hardware die in deze sprint terugkomt vind ik erg interessant omdat hierbij twee werelden samenkomen; het maken van een fysiek product en daarbij het ‘brein’ hiervan ontwikkelen en toepassen. Het team is ook erg leuk en we kunnen het allemaal goed vinden met elkaar wat de goede werksfeer ten goede komt.
Vanaf het begin heb ik erg het idee dat ik het groepje een beetje vooruit trek en aanstuur wat de planning en taakverdeling betreft omdat ik dit project graag succesvol wil afronden en deze sprint behalen. Dit zie je terug in de deelproducten die we hebben gemaakt (software, hardware, casing en ontwerp). De casing en het ontwerp van de case heb ik op me genomen en dit verliep over het algemeen goed. Ik heb alles overlegd met het team, van het basisformaat tot op welke positie de sensoren en motoren moeten komen.
Soms moet je ook de discussie met elkaar aangaan om tot een beter resultaat te komen. Een voorbeeld hiervan tijdens deze sprint was de koppeling tussen de wielen en de as van de servomotor. Dit is een cruciaal punt van het product wat we aan het maken zijn maar hiervoor moesten kosten gemaakt worden. Door het goed te onderbouwen en overleggen hebben we besloten om deze toch aan te schaffen.
Hierdoor heb ik goed leren samenwerken met de anderen in het team. Dit is van belang heb ik gemerkt omdat alle deelproducten uiteindelijk samen moeten komen en één eindproduct vormen. Wanneer je miscommunicaties hebt of dingen aanneemt zonder het te controleren kan het wel eens mislopen waardoor je met een groot probleem komt te zitten net voor de deadline.
Wat ook fijn is aan binnen een team werken is dat je kennis kan uitwisselen. Zo heb ik bijvoorbeeld van Mario veel geleerd over de electronica aansluiten op de breadboard en Adafruit en ik heb hem weer uitleg gegeven over de werking van een mosfet/relais en de verschillen tussen deze twee.
Resultaat van de battle
Toch was het spannend om de battles in te gaan omdat je niet weet wat de tegenstander aan boord heeft en toe in staat is. De eerste ronde was misschien wel de lastigste omdat deze een schans had waar wij bijna overheen reden. Gelukkig waren we in staat om hem weg te duwen door achteruit te rijden en zo kregen we grip en werd de ander van tafel geduwd.
De andere rondes waren een stuk interessanter. In de halve finale moesten we ons wapen gebruiken omdat de tegenstander erg stevig en zwaar was en daarom kon hij niet weggeduwd worden. Unaniem besloten we het wapen toe te passen, een harde knal en de vijand vloog letterlijk in stukken en van tafel af zoals ik eigenlijk al verwachtte. Ons Experiment #17 was door zijn massa en grip in staat om op de grond te blijven staan zonder schade.
De finale, het was de bedoeling om deze ook af te sluiten met een knal maat jammer genoeg was het tweede patroon met perslucht beschadigd waardoor de druk er af was en niets uithaalde. Desondanks dat waren de vier servomotoren in combinatie met de rubberen wielen krachtig genoeg om ook in de finale de ander zonder moeite het veld uit te werken!
Videocompilatie
Afbeeldingen Sprint 1.3

Ideeën en sensoren 
Schetsen opbouw circuits 
Verbinding wiel/servo 
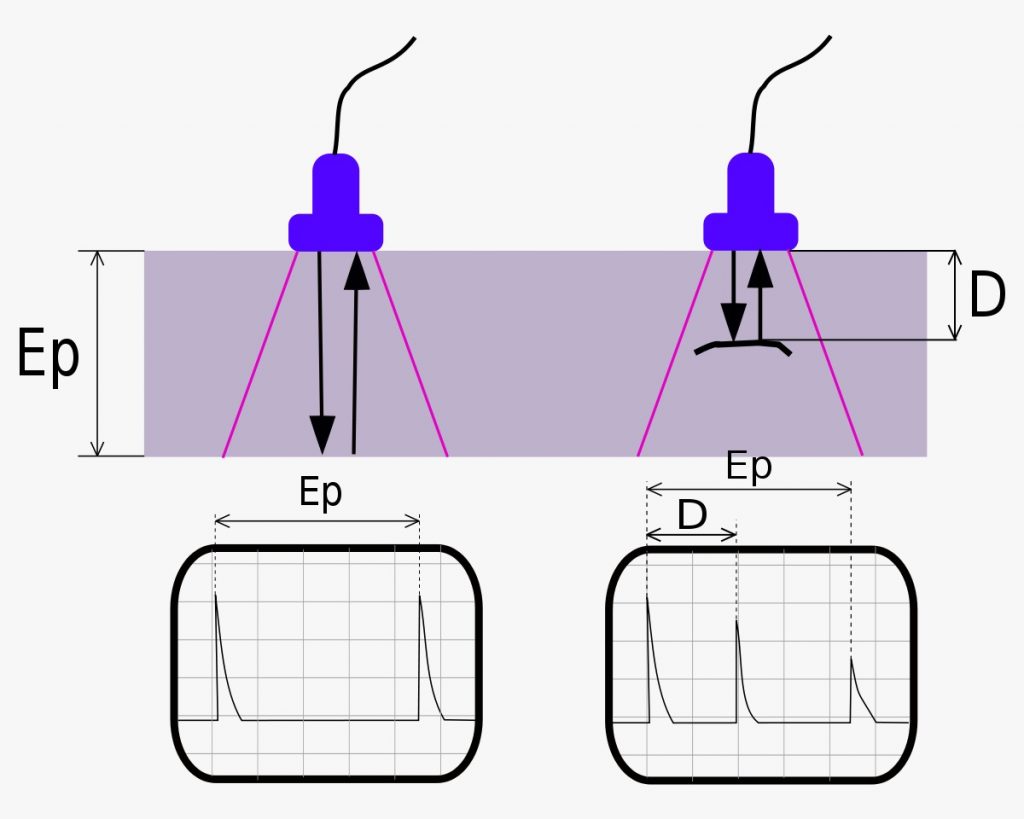
Ultrasoon spreid 
Ontwerp schematisch 1 Ontwerp schematisch 2 Mosfet Beschikbare relais Stadslab 
Circuit relais Praxis City Wielen en servo’s 
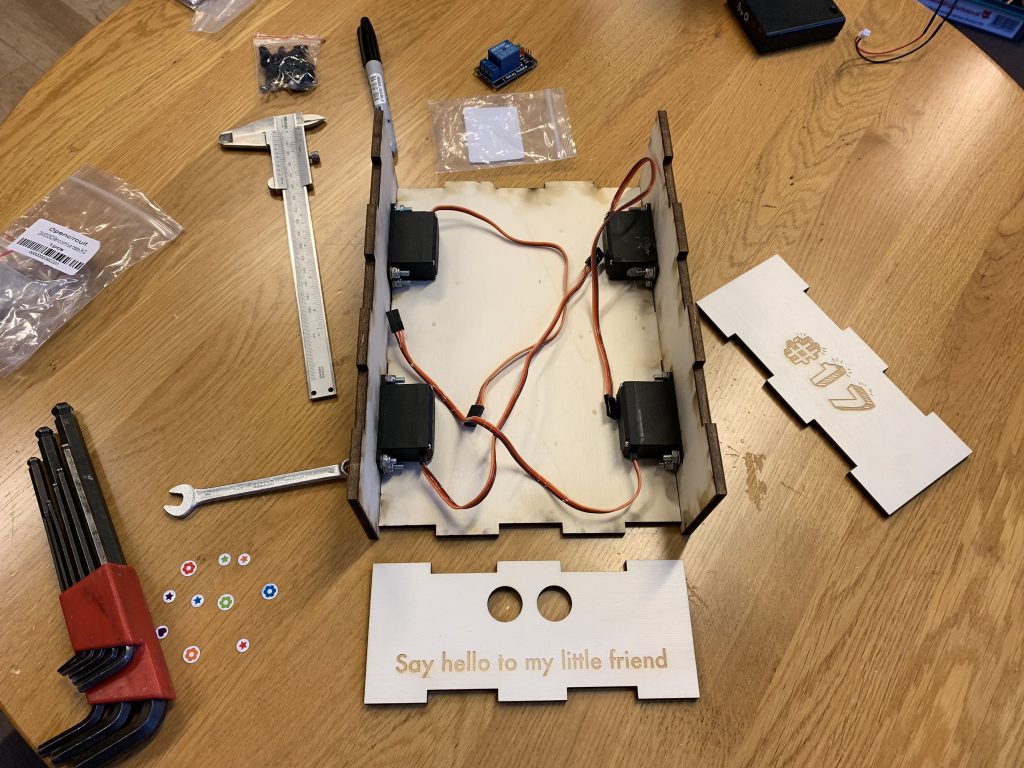
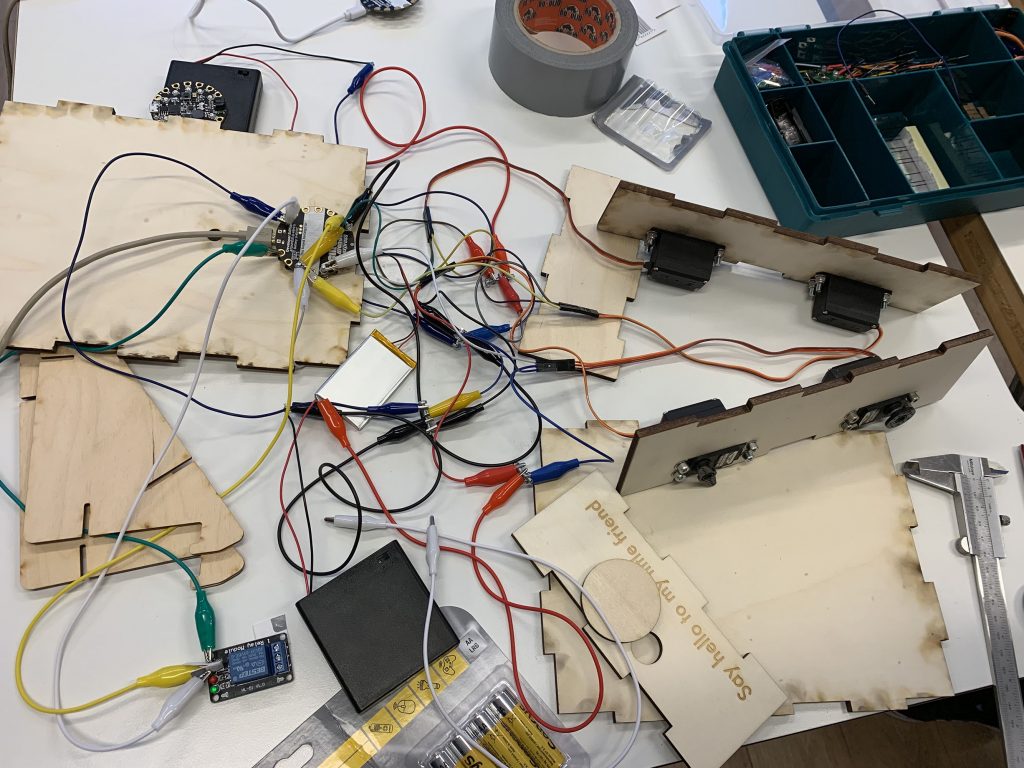
Confetti patroon Opzet behuizing Relais testen Servo’s testen 
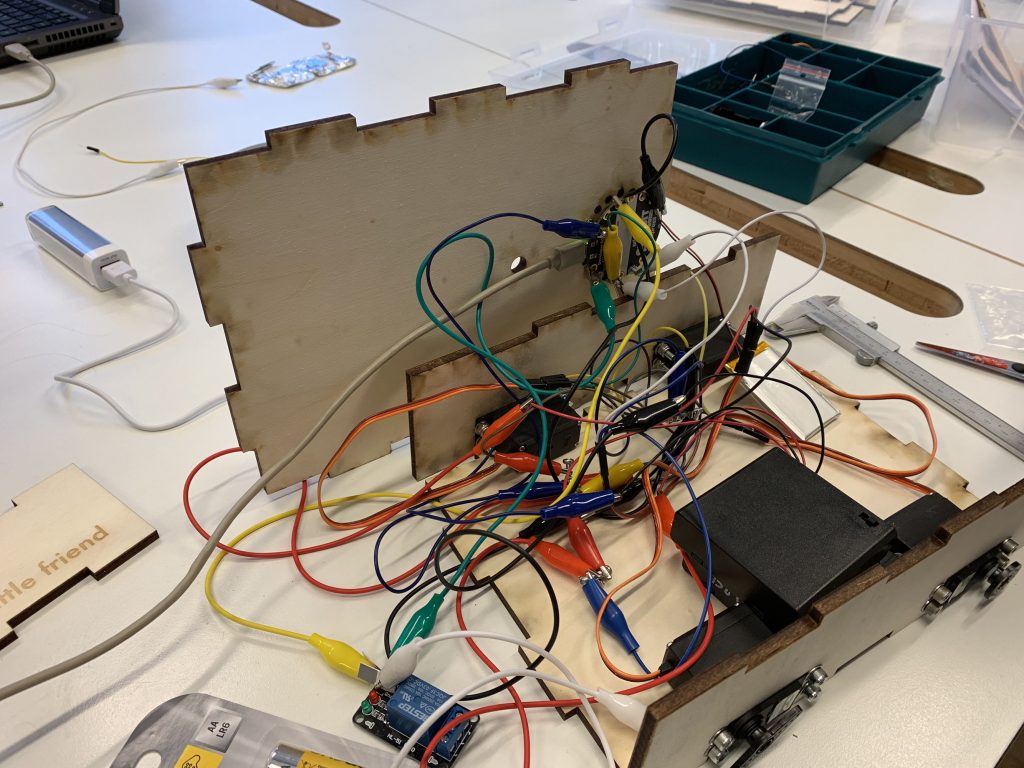
Spullen van thuis Servo’s testen Behuizing eerste keer lijmen Aansluiting cannon relais 13 V, 3,3 A V Aftermath cannon










Samenwerkingsovereenkomst
Samenwerkingsovereenkomst