(09/10/2019 – 01/11/2019)
In deze sprint moest we samen met ons groepje een “smart pushy object” maken. Dit betekent dat we de vorige twee robots die we hebben gemaakt als het ware moesten combineren om een pushy object te maken die gebruik maakt van sensoren. De sensoren die we moesten gebruiken waren de sensoren die ieder had gebruikt voor sprint 2.
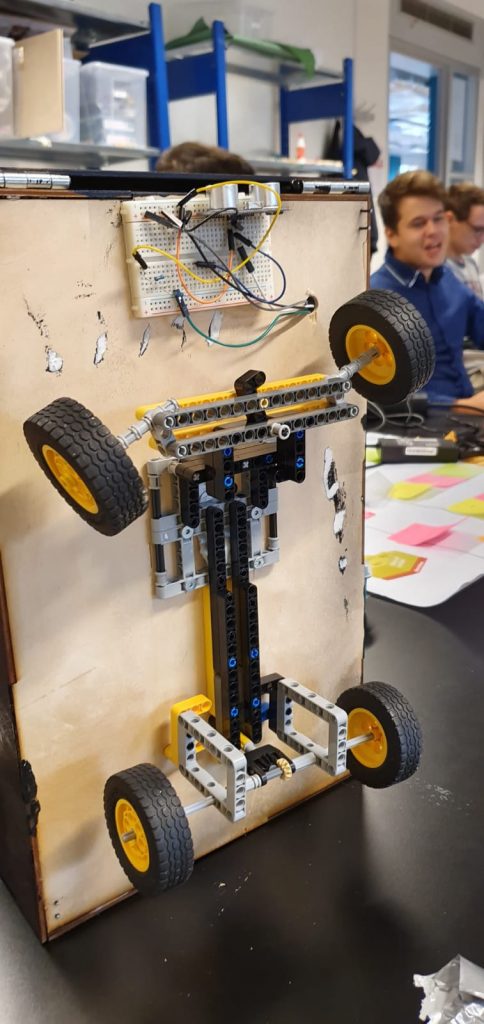
Woensdag zijn we begonnen met sprint 3. Tijdens CLE werd uitgelegd wat we voor sprint 3 moesten gaan doen. Ook moesten we woensdag veel brainstormen over wat voor robot we willen gaan maken, hoe we de sensoren willen gebruiken en wie welke taak gaat doen. Sasja ging de One Pager maken, Thijs en ik gingen de elektronica en code maken en Thijs en Sherko gingen ook samen de casing van de robot maken. Thuis heb ik nog het stuurmechanisme voor onze robot gemaakt.
Maandag hebben we besproken wat er nog allemaal moet gebeuren. Ook hebben thijs en sherko het eerste gedeelte van de casing gemaakt. Ik heb een infrarood afstandbediening gemaakt om de robot aan te sturen met een breadboard en een paar knopjes
Dinsdag heb ik de code voor de infraroodafstandsbediening verbeterd en heb ik de ontvanger geprogrameerd zodat die een motoraanstuurt wanneer er een specifiek signaal wordt ontvangen.
Woensdag heb ik het iron man block en het pitch perfect block afgemaakt. Ook heb ik op woensdag de casing voor de infrarood afstandsbediening gemaakt.

Vrijdag heb ik aan het one of a kind block gewerkt.
Zondag heb ik aan het one of a kind block gewerkt.
Donderdag hebben we afgesproken om nog aan de robot te werken. We hebben de casing van onze robot zwart gespoten. Ook hebben Sherko en ik het lego frame waar de wielen aanzitten afgemaakt. Ook hebben we een schep aan de voorkant van de robot geplaatst. Aan het einde van de dag hebben we nog besproken wat er nog allemaal moest gebeuren en wie wat moest doen.
Vrijdag heb ik het programma geschreven zodat de motoren kunnen bewegen wanneer een signaal van de infrarood afstandsbediening wordt ontvangen.
https://youtu.be/Kzqyq5rL9NMhttps://youtu.be/Z7tB60DZeyc
Maandag hebben sherko en ik alle elektronica aangsloten op het frame en in de robot gestopt ook hebben we nog een paar kleine dingen aangepast aan de programma’s.
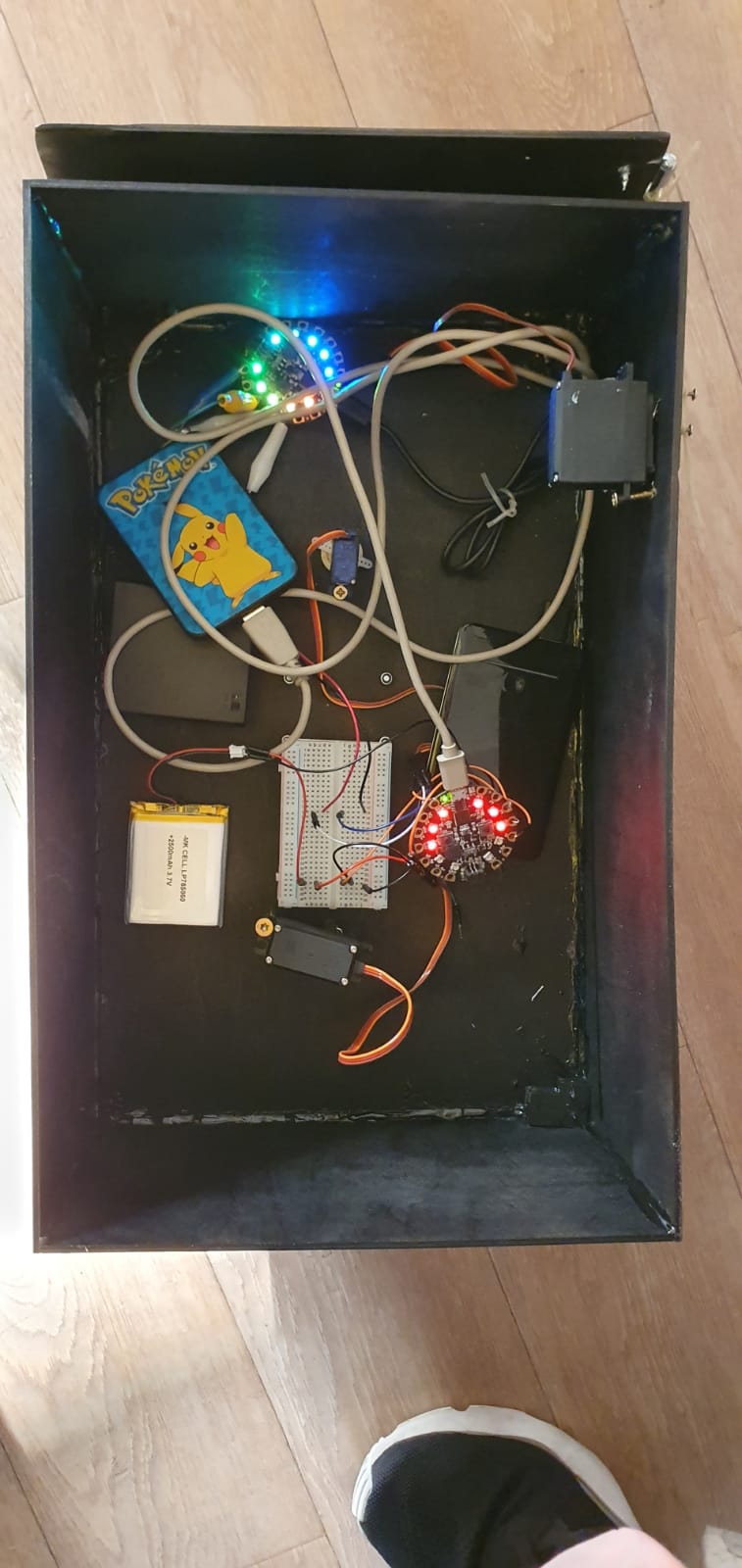
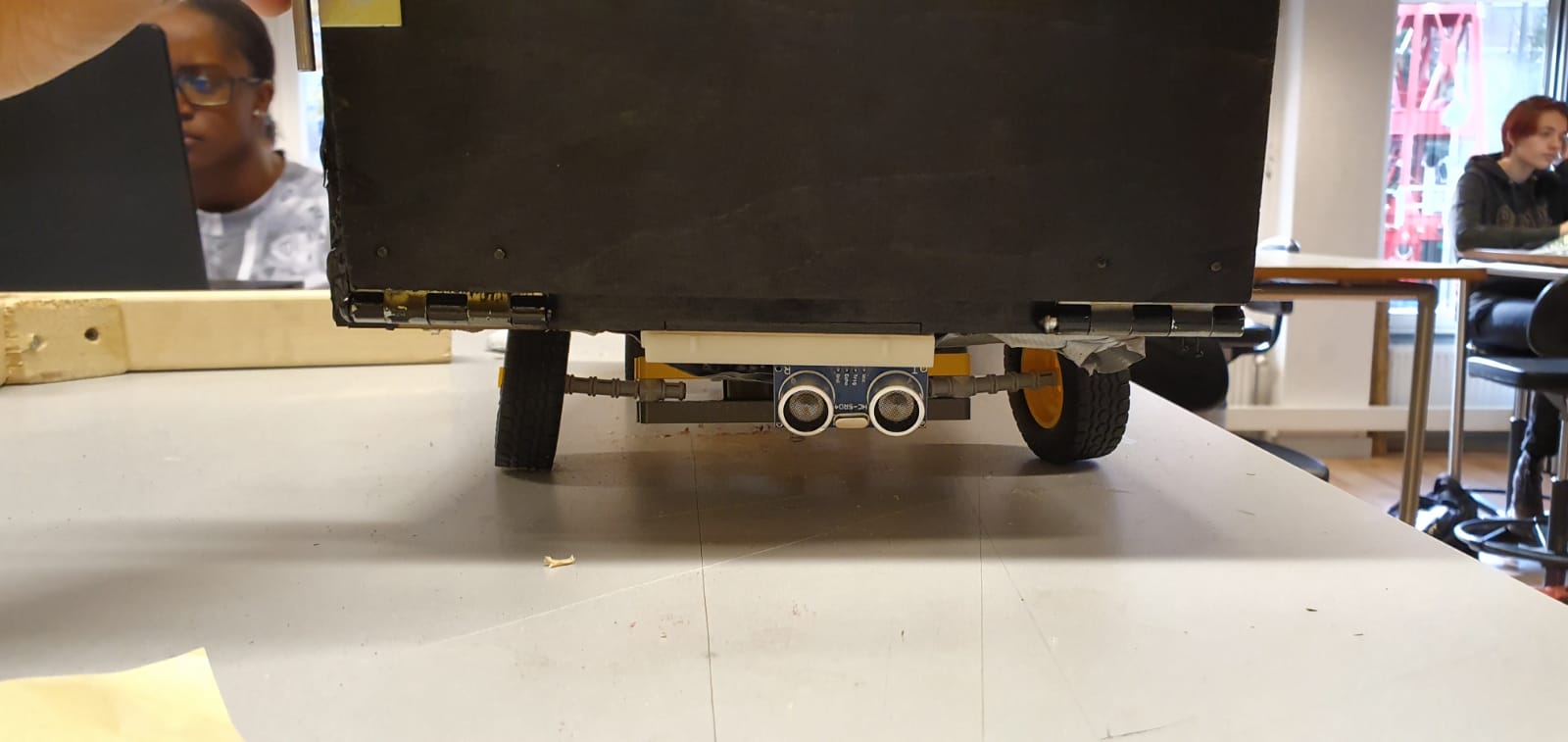
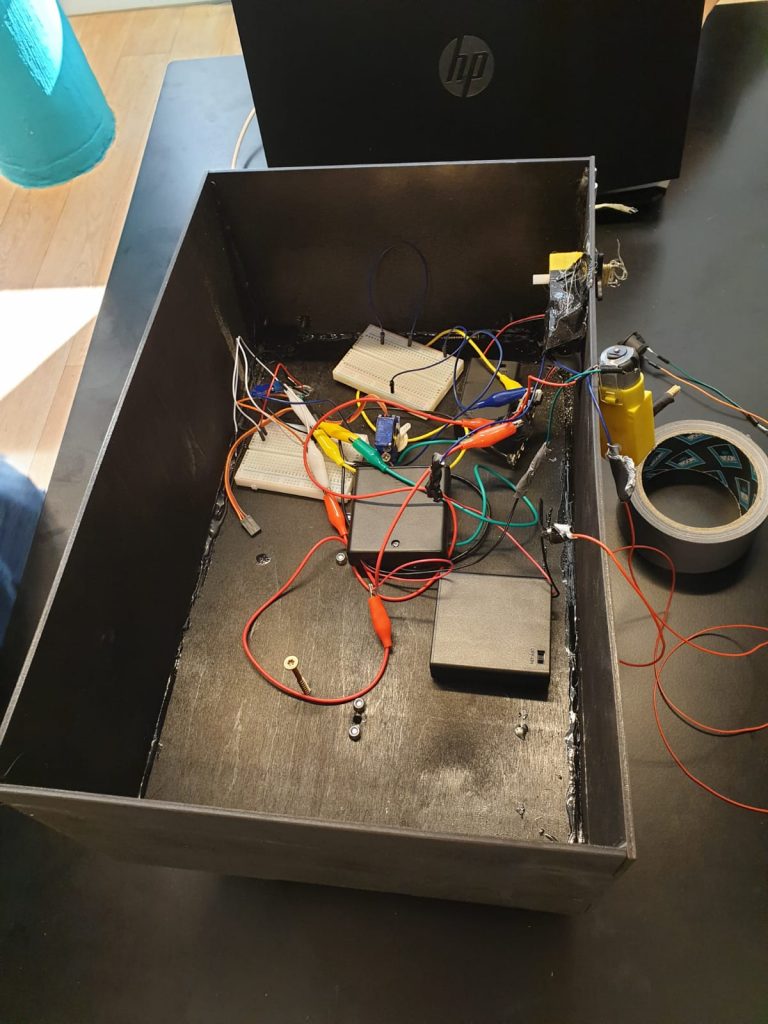
Woensdag moesten we alleen nog maar een aantal dingen toevoegen. We moesten nog de motor voor de schep aansluiten, een bovenkant voor de casing en de geluid- en bewegingsensor. We waren de aandrijving van de wielen aan het testen nadat we 2 batterij houders hadden aangesloten zodat de motoren goed konden draaien en toen ging alles mis. Er was iets niet goed aangesloten waardoor er kortsluiting was en het heel heet werd en kabels begonnen te smelten. We hebben toen aan een peercoach gevraagd wat hij adviseerde dat we moesten doen en hij zei dat we beter DC motoren konden gebruiken in plaats van servo motoren. Het enige probleem was dat me de dc motoren niet konden aansluiten op de adafruit omdat we geen mosfet hadden. Ook konden we deze motoren niet aansluiten op het frame met de wielen waardoor we de robot niet vooruit konden laten rijden. Toen we uiteindelijk de robot moesten opleveren werkte alleen de schep aan de voorkant van de robot. De schep konden we aansturen met een aan/uit switch. Alle sensoren werkten dus wel uiteindelijk maar we konder er geen gebruik van maken. De infrarood afstandsbediening werkte heel goed maar we konden er dus niks mee besturen omdat het was doorgebrand. De ultrasoon sensor werkte ook goed maar konden we niet de schep laten besturen omdat we de DC motor niet aan de adafruit konden aansluiten. Ook deden de beweging- en geluidsensor het goed maar konden we daar ook niks meer mee.
Leerstrategie
Wat was je aanpak om nieuwe dingen te leren en wat was het resultaat? Wat kan beter of anders?
In sprint 2 had ik de infrarood sensor gebruikt om een smart object te maken. Dit was alleen nog heel simpel en was gewoon een constant signaal dat verstuurd werd. Aangezien ik in sprint 3 de infrarood sensor weer moest gebruiken en het weer een pushy object moest worden kwam ik op het idee om een infrarood afstandbediening te maken. Dit wou ik eerst doen door de knoppen op de adafruit zelf te gebruiken. Toen ik hier een beetje over ging nadenken dacht ik eraan dat dat helemaal niet praktisch zou zijn want dan zou je de adafruit naar de ontvanger moeten richten waardoor je dan niet meer kan zien waar je op drukt. Ik moest dus iets anders gaan verzinnen. Ook zitten er op de adafruit zelf te weining knoppen om een volledige afstandbediening te maken. Toen kwam ik op het idee om de vier drukknoppen die in de kit die we moesten aanschaffen te gaan gebruiken. Ik heb toen alle vier de drukknoppen op een breadboard gezet en aan de pins aangesloten. Toen kwam ik alleen een beetje vast te zitten omdat ik niet wist hoe ik verder moest. Dit was opgelost nadat ik heel even op het internet had gekeken. Ik heb toen gevonden dat ik nog een VOut naar alle knoppen moest doen. Dit had ik gedaan en toen moest ik alleen nog programmeren. Dit was ook een beetje moeilijk in het begin maar nadat ik een beetje had geprobeerd kwam ik er al snel uit hoe het moest. Ik moest zorgen dat er op alle pins die ik had aangesloten een signaal ontvangen kon worden. Toen heb ik een IF gebruikt om te kijken wat er moest gebeuren wanneer een knop in werd gedrukt. Hier heb ik toen met de lichtjes een soort code aan gegeven zoals ik ze ook wou gebruiken om de robot uiteindelijk te gaan besturen. Dus naar voren, achter, links en rechts. Nadat dit allemaal werkte heb ik de IF veranderd zodat er een bepaald infraroodsignaal wordt verstuurd wanneer er op een knop geklikt werd. Toen heb ik een ander stuk code gemaakt waarin ik een IF heb gebruikt om aan te geven dat er bij het ontvangen van een signaal dezelfde lichtcode gebruikt moest worden. Dit werkte ook gelijk. Het sturen en ontvangen van een infraroodsignaal had ik natuurlijk al een keer gedaan en was dus niet zo moeilijk. Hierna heb ik in de IF commandos gegeven dat er een motor moest bewegen wanneer een signaal werd ontvangen. De afstandbediening werkte dus. Nu moest ik de motoren dan alleen nog aansluiten op het frame. Dit hadden we de dag dat we de robot moesten opleveren gedaan. Ik had alles aangesloten maar had niet een tweede keer gecheckt of alles goed was aangesloten. Nadat we toen de robot aan het testen waren en het maar ongeveer de helft van de tijd naar behoren werkte hadden we aan een van de peercoaches gevraagd of die wist waarom dat was. Toen die kwam kijken en aan hem demonstreerde wat de robot moest doen en wat dus niet werkte begon er opeens rook uit te komen en begon een kabeltje te smelten. De peercoach had dus even gekeken wat er was en zag dat het niet helemaal goed was aangesloten waardoor er kortsluiting kwam. Ik heb hier dus van geleerd dat je met het aansluiten van motoren heel goed moet opletten of je het goed aansluit en dat je dus beter nog een keer kan dubble checken. Ook is het goed om te zorgen dat je verschillende kleuren kabeltjes gebruikt of in ieder geval niet dezelfde kleuren kabels naast elkaar doet. Ook heb ik geleerd dat als je dit soort dingen wilt doen met het aansluiten van meerdere motoren je beter een arduino ofzo kan gebruiken. Daar kan namelijk meer voltage enzo doorheen en hoef je dus niet zo op te letten dat je de externe accu’s goed aansluit.
Reflecteren
Je hebt op je Blog gereflecteerd op het werk dat je tijdens deze sprint uitgevoerd hebt, waardoor jouw ontwikkeling inzichtelijk geworden is.
Ik vind dat ik met Sherko het meest uitgevoerd deze sprint. Wij hebben voor het grootste gedeelte de ideeën voor de sensoren bedacht en hebben bijna de hele robot met zijn tweeën gemaakt. Ik heb uiteindelijk het frame voor de wielen gemaakt, de infrarood afstandbediening, de aansturing voor de aandrijving van de wielen en het sturen. Ik ben ook best wel blij met de dingen die ik deze sprint heb gedaan en de hoeveelheid dingen die ik heb gedaan.
Voor de rest ben ik deze sprint ook nog veel bezig geweest met drie building blocks. Ik heb namelijk mijn Pitch Perfect, iron man en one of a kind block (af)gemaakt. Hier heb ik buiten het maken van de dingen van de robot ook nog veel tijd in gestoken. Ik vond het one of a kind block ook best wel interesant om te maken. Ik ben namelijk naar de eindhoven maker faire geweest en heb daar veel interesante en gave dingen gezien en heb ook wat geleerd. Ook ben ik er bij het maken van dit block achter gekomen dat ik eigenlijk best wel makkelijk hulp kan vragen aan mensen die in dit vakgebied werk hebben.
Ik heb ook tijdens deze sprint een online cursus van C# afgemaakt en heb dus een beetje in die taal leren programmeren. Ik ben ook heel enthousiast om mijn programmeer kennis te vergroten en om te kunnen beginnen aan het leren van Unity en het maken van een game.
Motivatie
Wat was je rol in het team, hoe heb je dat ingevuld en hoe heeft dit jouw leren beïnvloed?
Ik vind dat ik tijdens deze sprint een redelijk grote rol had in het team. Ik heb veel aan de robot gewerkt en heb ook de anderen wat bijgeleerd. Ik wist namelijk al hoe je met een externe stroombron een motor kon aansturen via de adafruit. Dit heb ik aan de anderen geleerd. Ook heb ik de anderen een beetje aangestuurd om dingen te doen en te blijven werken. Dit deed ik omdat Sherko en ik al veel aan de robot hadden gedaan en de anderen heel vaak met anderen aan het praten waren terwijl er veel moest gebeuren. Omdat ik graag de robot af wou hebben heb ik dus vaak ook gezegd dat er meer gewerkt moest worden. Hiervan heb ik ook geleerd dat andere mensen niet opeens iets gaan doen als er niks gezegd wordt. Als je dus wil dat ze iets gaan doen moet je niet gewoon wachten en kijken of ze daadwerkelijk gaan doen wat je wil dat ze doen. Je kan ze beter op een vriendelijke manier aanspreken en zeggen dat ze moeten werken. Als je dit natuurlijk al een paar keer hebt geprobeerd kan je natuurlijk wat bozer zeggen dat ze moeten werken, maar dat gaat meestal vanzelf als je het al een paar keer hebt gezegd.