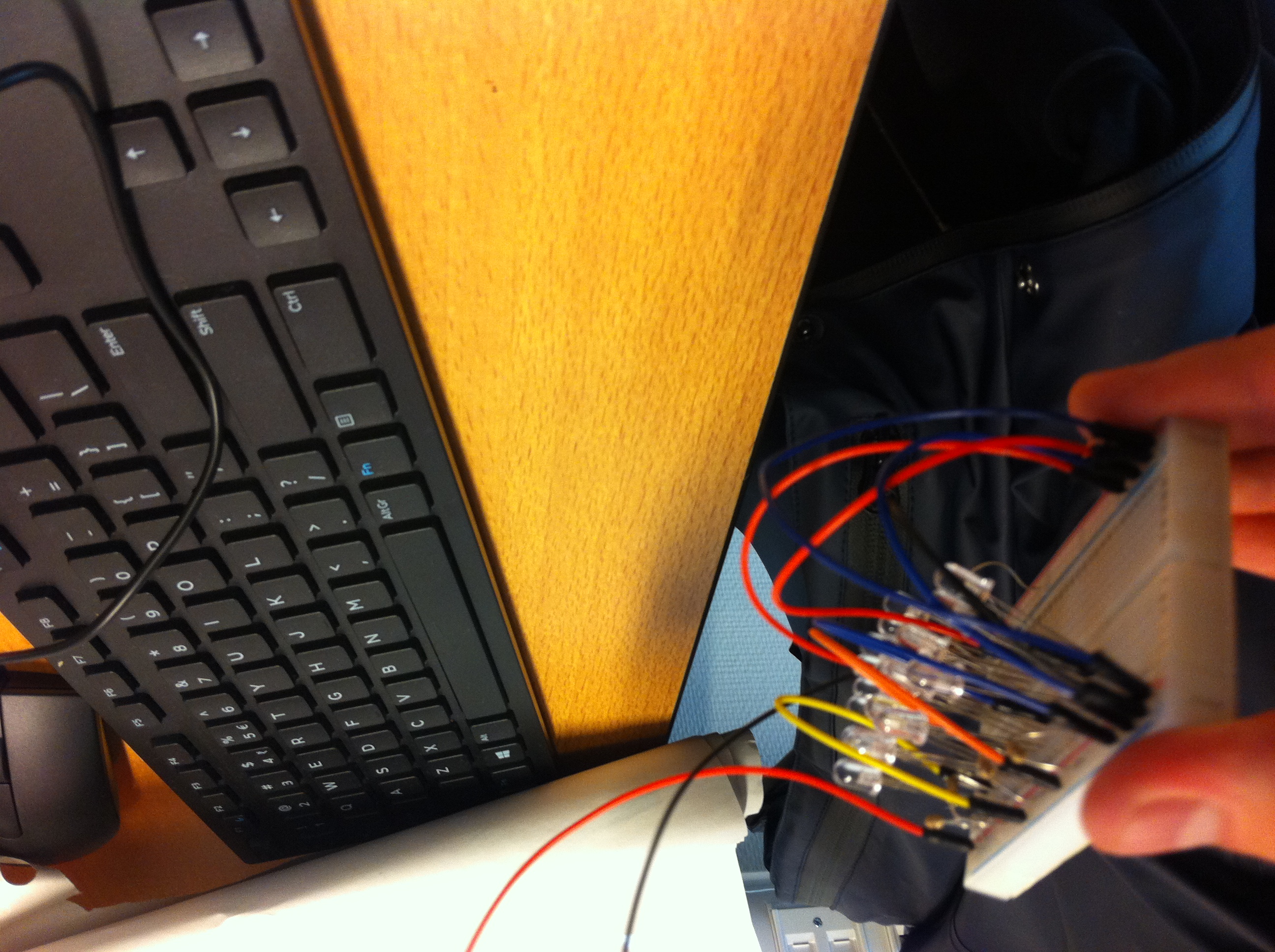
De led-lamp wordt een schakeling die bestaat uit meerdere seriële takken die onderling parallel geschakeld zijn. Er komen zes takken met daarin drie LEDs en een voor-weerstand. Omdat een LED geen interne weerstand heeft, moet de stroom door de voor-weerstand beperkt worden, anders branden de LEDs door.
In de datasheet van de LED (https://drive.google.com/open?id=0B5eQgeQFwJnKODd1dVNZeEVGRk0) staat dat de voorwaartse spanning (Uf) van dit type LED 1,3 volt is. Elke LED heeft dus 1,3V nodig om stroom door te laten en daardoor te gaan branden. We weten vanuit de natuurkunde dat de spanning in een serie schakeling wordt verdeeld over de aanwezige componenten, dus we verdelen per tak de spanning over de voor-weerstand en een N aantal LEDS. Hiermee kun je dus stellen dat de bronspanning (Us) – N * Uf >= 0 moet zijn. Wanneer dit niet het geval is, treedt er een zogeheten reverse voltage op, waarbij de stroom de andere kant op loopt en de LEDS en mogelijk andere componenten beschadigd. Voldoende spanning is dus van belang.
Elke serie tak heeft ook een eigen weerstand nodig. Elke LED heeft een kleine afwijking in de voorwaartse spanning, waardoor ze zich onderling net iets anders gedragen. Stel je zet drie LEDs na een weerstand parallel aan elkaar, dan zal de stroom sneller door de ene lopen dan door de andere, waardoor die heter wordt en als eerste doorbrandt en de andere niet oplichten. Daarom heeft dus elke tak een eigen weerstand, zodat overal evenveel stroom loopt.
Volgens de datasheet van de LEDs kan er maximaal 50mA doorheen lopen voordat de LED doorbrandt. De overige gegevens uit de sheet zijn gebaseerd op 20mA. Met de grafieken onderaan de datasheet kan de relatie tussen de stroom, spanning, temperatuur en lichtintensiteit uitgelezen worden. Ik heb hieruit opgemaakt dat het veilig is om de LED op 30mA te laten branden, omdat dit voldoende marge geeft met de limiet van 50. Bovendien geeft de grafiek aan dat er verhoging van 20 naar 30mA een vergroting van 150% in de lichtintensiteit geeft, dit is dus makkelijke winst.
Per tak staan er drie leds in serie. Hier is voor gekozen, omdat deze tak op deze manier op de Arduino aangesloten kan worden. De Arduino levert namelijk 5V. De voorwaartse spanning van de LED is 1,3V. dus 5 – 1,3N >= 0 geeft N <= 3. Oftewel, 3 LEDs is het maximale wat een tak kan dragen, de overige 1,1V wordt met een weerstand opgenomen. Bijkomend voordeel en risico-overweging is dat, net als bij kerstverlichting, elke LED moet branden om een serie tak werkend te houden. Dus als er heel veel in serie staan en er gaat er een kapot, is je hele tak kapot. Door dit te scheiden, blijft het merendeel overeind.
We willen dat er 30mA door de LED stroomt. In een serieschakeling blijft de stroom gelijk, dus door de drie LEDs loopt dezelfde 30mA. Dus per parallelle tak loopt er 30mA. De Arduino kan op de 5V-pin maximaal 200mA leveren zonder veiligheidsrisico’s. Als je hier overheen gaat, loop je kans een interne zekering door te branden. Wij willen zes à zeven takken plaatsen. Dit gebruikt dus alle beschikbare stroom en zit al op of over de grens. Omdat dit niet veilig is, hebben we ervoor gekozen om een 9-volts-batterij als externe stroombron te gebruiken. Deze levert zoveel stroom als dat de schakeling vraagt, met een maximum van de capaciteit van de batterij (rond de 500mAh). Hier kan de schakeling enkele uren op branden.
De weerstand voor een 9V stroombron komt per tak uit op 169 Ohm, we hebben gekozen voor 180 Ohm omdat dit het dichts in de buurt komt. Als we per tak namelijk 9 Volt leveren, en 3 LEDs hebben, dan blijft er per tak (9 – 3 * 1,31) = 5,07V over. Deel dit door de stroom (3mA) en dan kom je op 169 Ohm.