Voor deze sprint hebben we ons gefocust op de volgende verbeterpunten:
2e Grutto Case
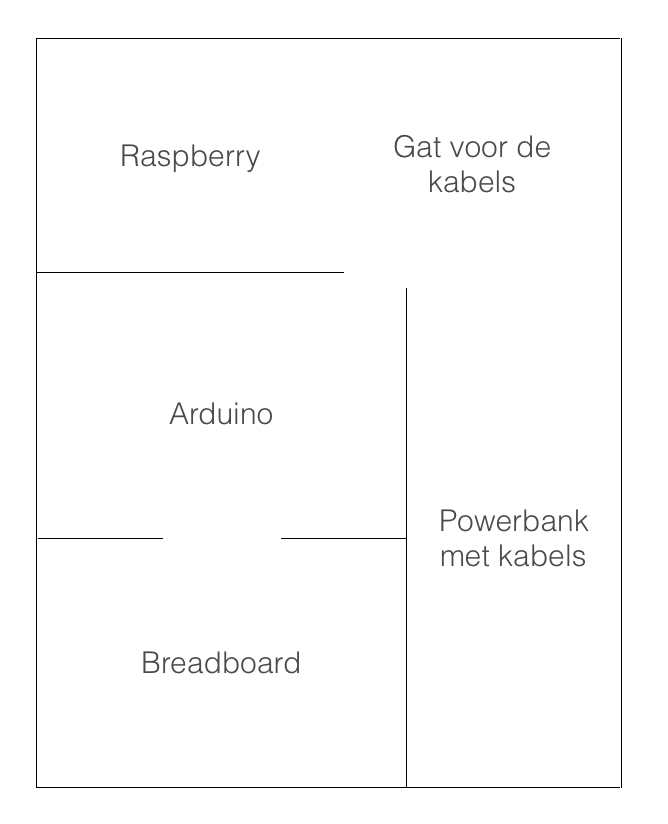
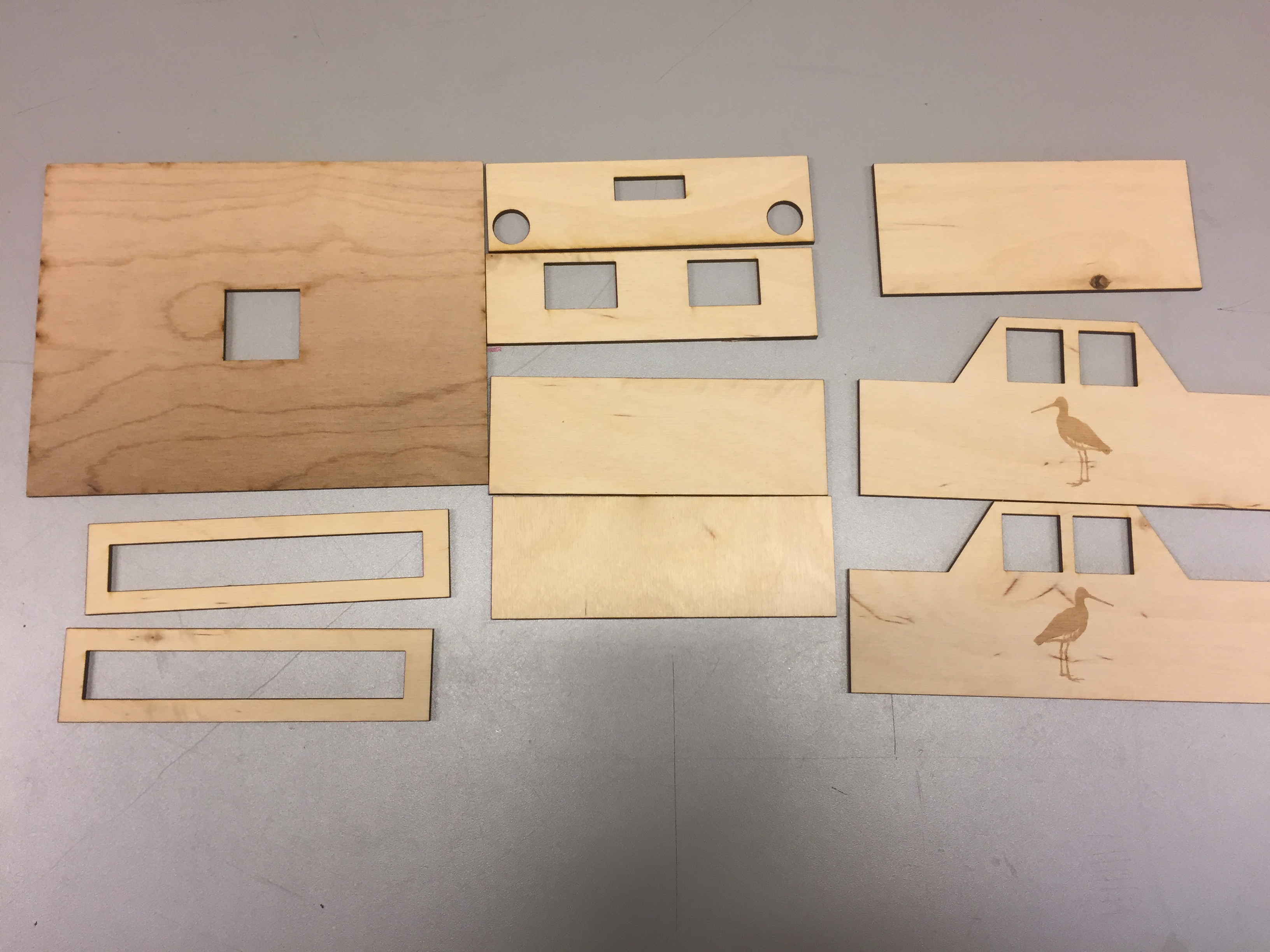
Na de review van sprint 6 werd het ons duidelijk dat we de Grutto Case van de Night Vision Auto kunnen verbeteren. Carlo en Jeremy namen de tijd om eerst handmatig de afmetingen nogmaals te berekenen voordat ze verder gingen met het ontwerpen van de Grutto Case. Ze zorgden ervoor dat de Grutto Case dit keer wel leek op een auto. Daarnaast planden ze ook in hoe en waar de extra gaten in de doos gemaakt zouden worden door de lasersnijder zodat de componenten en kabels goed geplaatst kunnen worden.
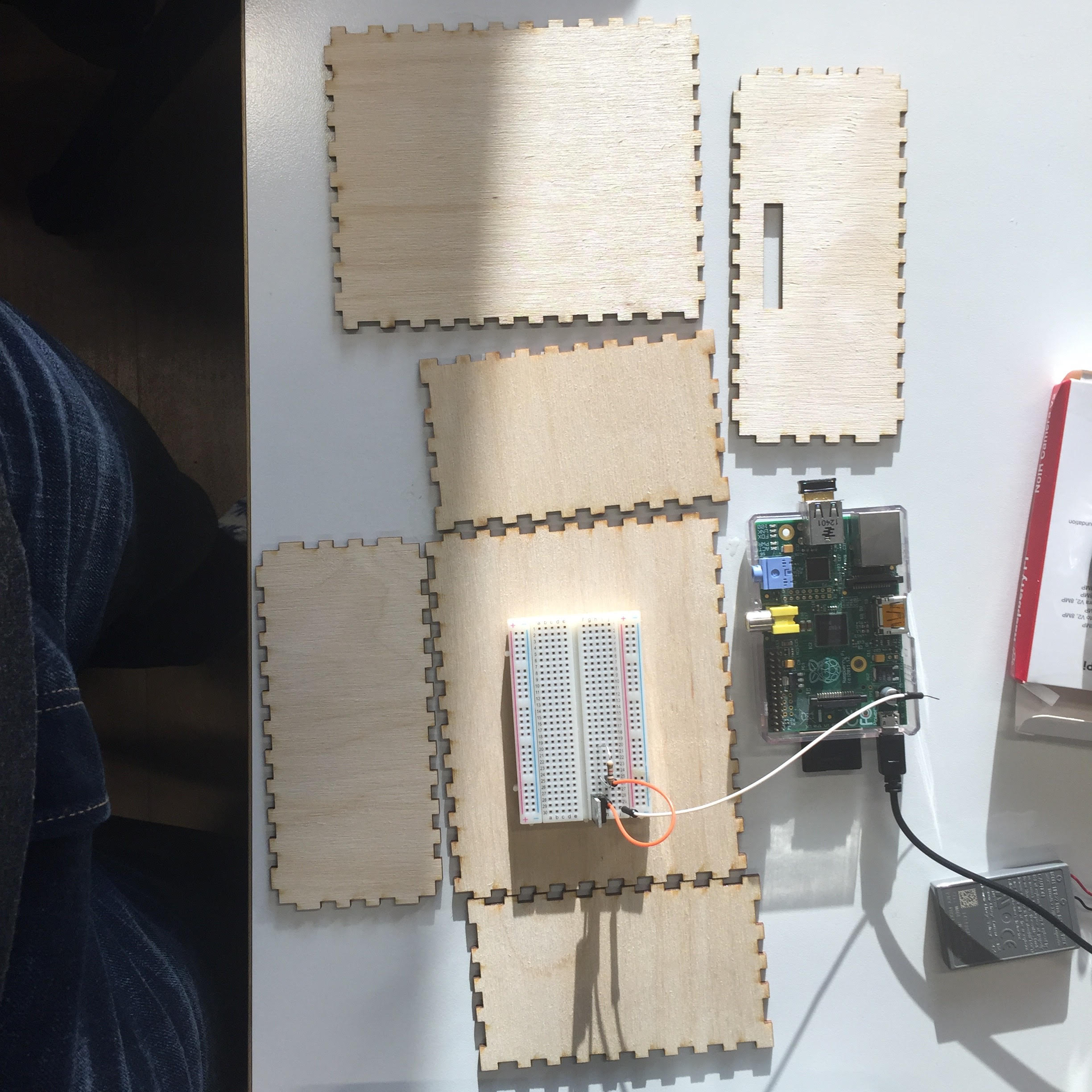
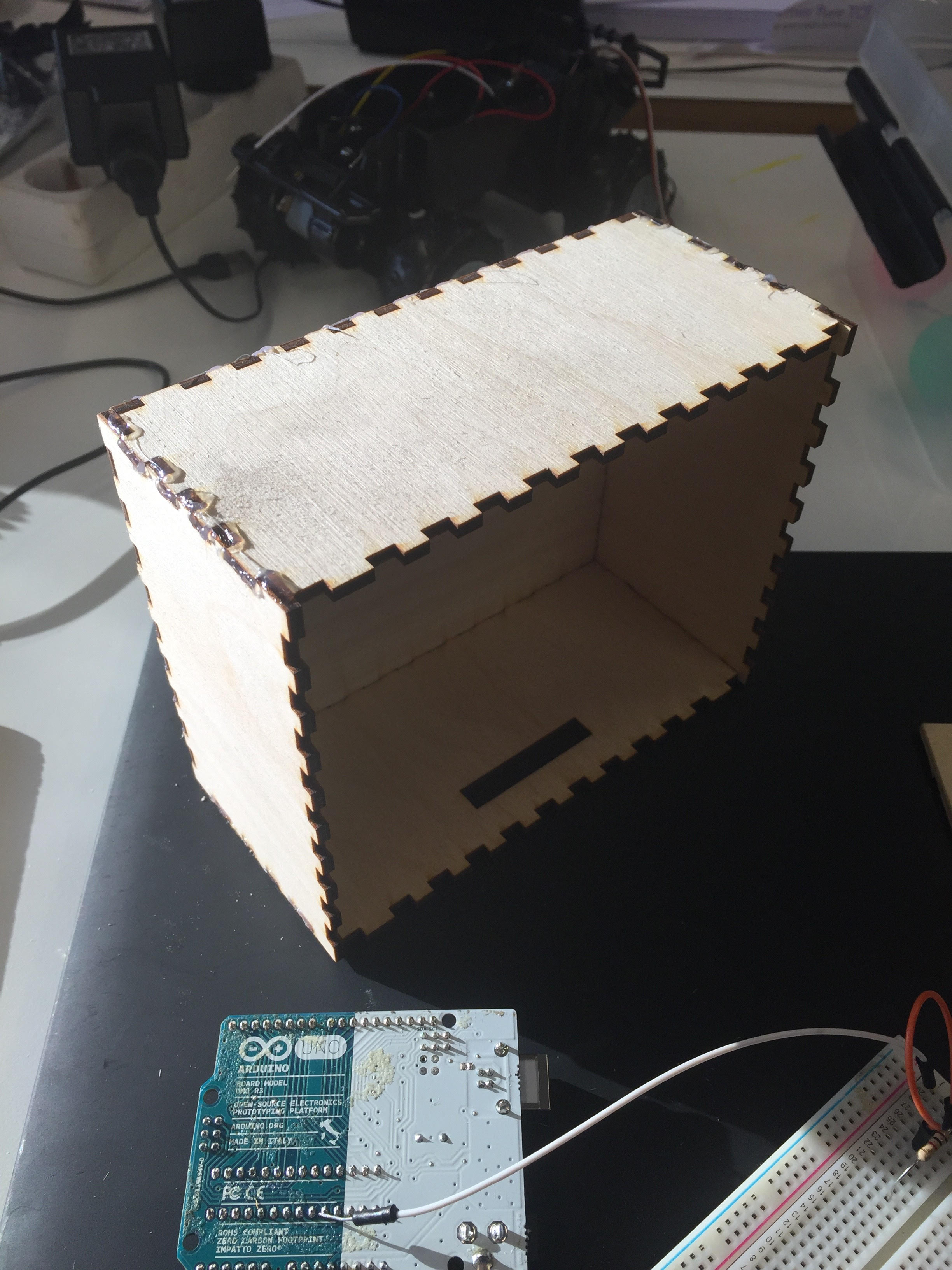
De volgende werkdag was het tijd om de Grutto Case waar te maken. in de vroege ochtend nam Carlo de tijd om de lasersnijder te reserveren voor gebruik en tijdens het wachten totdat Carlo aan de beurt was nam hij de kans om de Grutto Case te voorzien met een logo, van een Grutto Natuurlijk. Tenslotte was het alleen nog maar de houten vlakken lijmen en daarna ook nog de componenten vast lijmen. Dit is het resultaat.


Infra Rood Lampen gekoppeld aan de schakeling
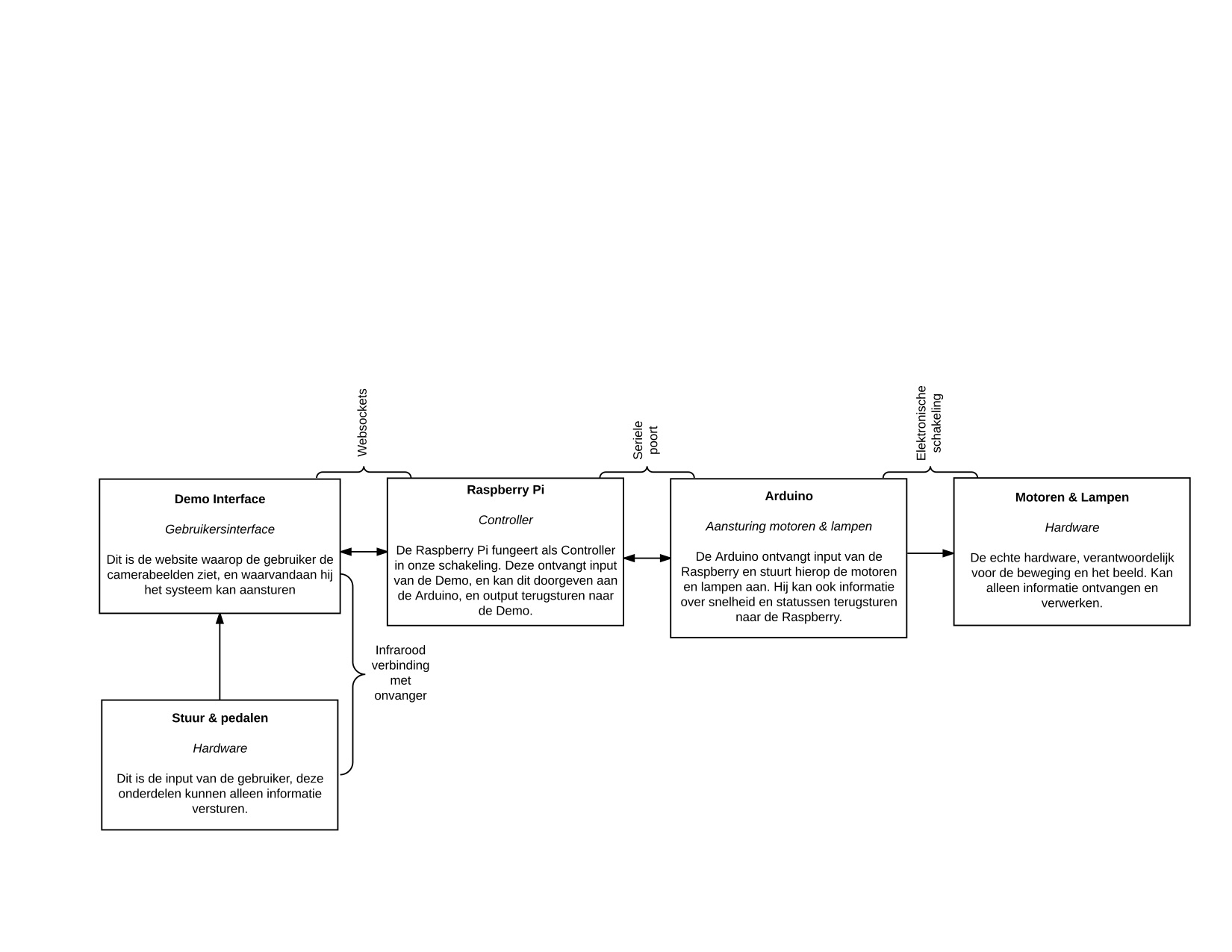
Na de review van sprint 6 hadden we nog geen oplossing gevonden voor ons probleem dat we de infra rood lampen niet aan konden krijgen. Ons probleem lag bij onze stroom voorziening. We wisten wel van te voren dat we minstens 12 volt nodig hebben om de lampen aan te kunnen zetten. Dus een simpele optel som van 5 volt dat we uit onze Arduino halen en 4 keer 1,5 volt van AA batterijen komt uit tot 11 volt. En dat was alleen al voor onze D/C Motor nodig om de auto te laten rollen. Dus werd het Carlo al snel duidelijk dat we een batterijhouder van 8 keer AA batterijen ter beschikking moesten hebben. Daar werd dus gelijk voor gezorgd en de volgende werkdag konden we testen of het genoeg was om de twee infrarood lampen te voorzien van stroom. Gelukkig was het genoeg en dat wisten we ook eigenlijk van te voren. Want voor de gene die de natuurkundige formules nog kan herinneren van elektriciteit. Dat het volgende geldt in een parallel schakeling: U totaal = U 1 = U 2…. Waarbij U gelijkstaan aan volt. Dus zolang de schakeling op de breadboard in parallel staat voor de infra rood lampen dan gaat er niks mis.
Laatste controller functies op de Arduino
Omdat we van plan waren om de infra rood lampen aan de huidige schakeling te koppelen waren we ook van plan om ervoor te zorgen om de gebruiker instaat te stellen om ook de lampen aan en uit te kunnen zetten. Dus dat werd in verloop van de week verzorgd door Jeremy. Ook werden er kleine veranderingen gemaakt aan de controller functies die al bestonden, met name de D/C motor die pas aan gaat als de gebruiker de juiste knop 1 keer indrukt en hetzelfde verhaal geldt voor het uit zetten van de D/C motor. Jeremy had hiervoor gekozen zodat de gebruiker niet de pedalen van het stuur voortdurend in hoeft te drukken, dit was voor het gemak tijdens het testen en voor de gebruikers bij de eind markt.
Ontdekking: de aandrijving dc motor voor de auto was kapot.
Voor de review van sprint 6 hadden we problemen met de D/C motor. Hij wou niet meer draaien, eerst waren we er gezamenlijk van overtuigd dat de batterijen op waren. Maar nadat we nieuwe batterijen hadden gekocht werd het ons duidelijk dat het geen nut had op de D/C motor. Weken later observeerde Jeremy dat de D/C Motor kapot was, dit was te zien aan de onderkant van de motor omdat het plastic gebroken was waardoor de motor zowat van binnen in gebroken was. Gelukkig kregen we de motor weer draaiende door te proberen de breuk dicht te lijmen en daarna reed de motor weer.
Raspberry Pi update probleem
De Raspberry Pi werd aan het einde van het project erg langzaam, waardoor het installeren van nieuwe packages lastig werd en ook bijna niet meer over de hotspot gedaan kan worden. We liepen dus wat vertraging op en Matthijs nam de Raspberry mee naar huis om hem daar op te schonen en met snel internet de boel te installeren.
Interactie via het stuur
Omdat je tijdens het rijden het liefst je handen aan het stuur houdt, hebben wij ons systeem daar op afgesteld. Met enkele knoppen op het stuur kan de gebruiker nu door het menu navigeren en items selecteren. Toekomstige mogelijkheden hiervoor zijn bijv. spraaksturing, zodat de gebruiker echt moeiteloos en zonder afleiding het systeem kan gebruiken.