Tijdens deze week konden we de laatste hand leggen aan onze robot en zouden we deze daarna op woensdag middag om 14:00 presenteren en laten vechten met andere robots. Omdat we tijdens de vakantie nog niet toe waren gekomen aan het daadwerkelijk maken van de robot moesten we in vrij korte tijd ons bedachte product tot leven laten komen. Hiervoor begonnen we maandag met het lasersnijden van het design dat Céline aan de hand van mijn tekeningen had uitgewerkt in illustrator. Omdat het (zoals gewoonlijk) erg druk was in het stadslab duurde het tot ’s middags om te kunnen lasersnijden. Omdat verder alles inclusief de code al klaar was en alleen nog in elkaar gezet moest worden ging ik tijdens dit uurtje werken aan mijn herkansing van de buildingblock ‘Pitch Perfect’.
Ook heb ik samen met Furkan gekeken naar de one-pager die hij op dat moment aan het maken was. Ik heb hem nog wat ideeën aangeboden en zo probeerde ik d.m.v. een andere kijk op zijn product te geven het nog iets te verbeteren. Het uiteindelijke product van Furkan is echt super mooi geworden! Well done bro.

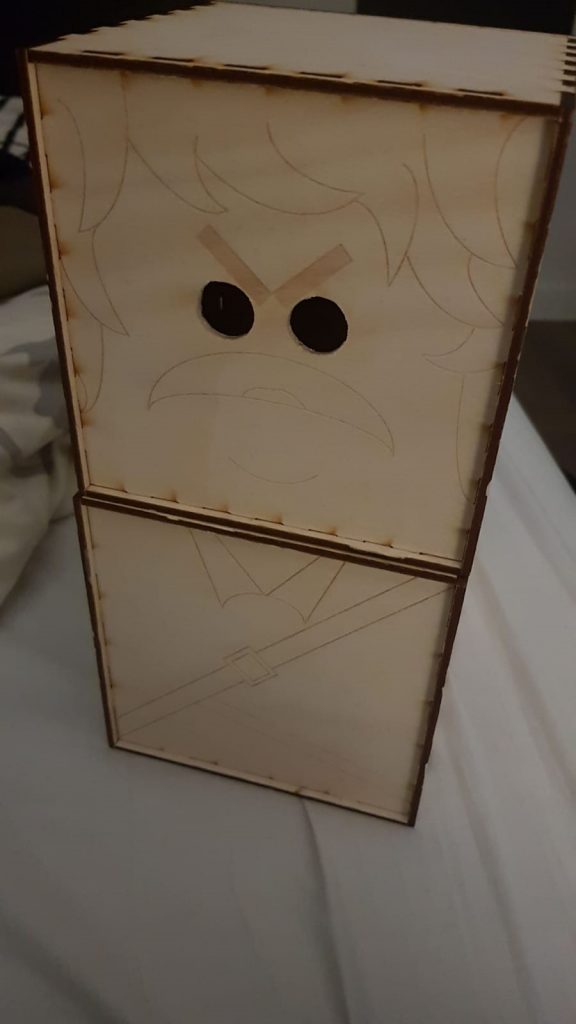
Hierna mochten we dan eindelijk lasersnijden. Dit duurde redelijk lang aangezien we veel grafeer werk hadden. Verder verliep dit spoedig zonder een foute poging, dus dit was erg prettig.
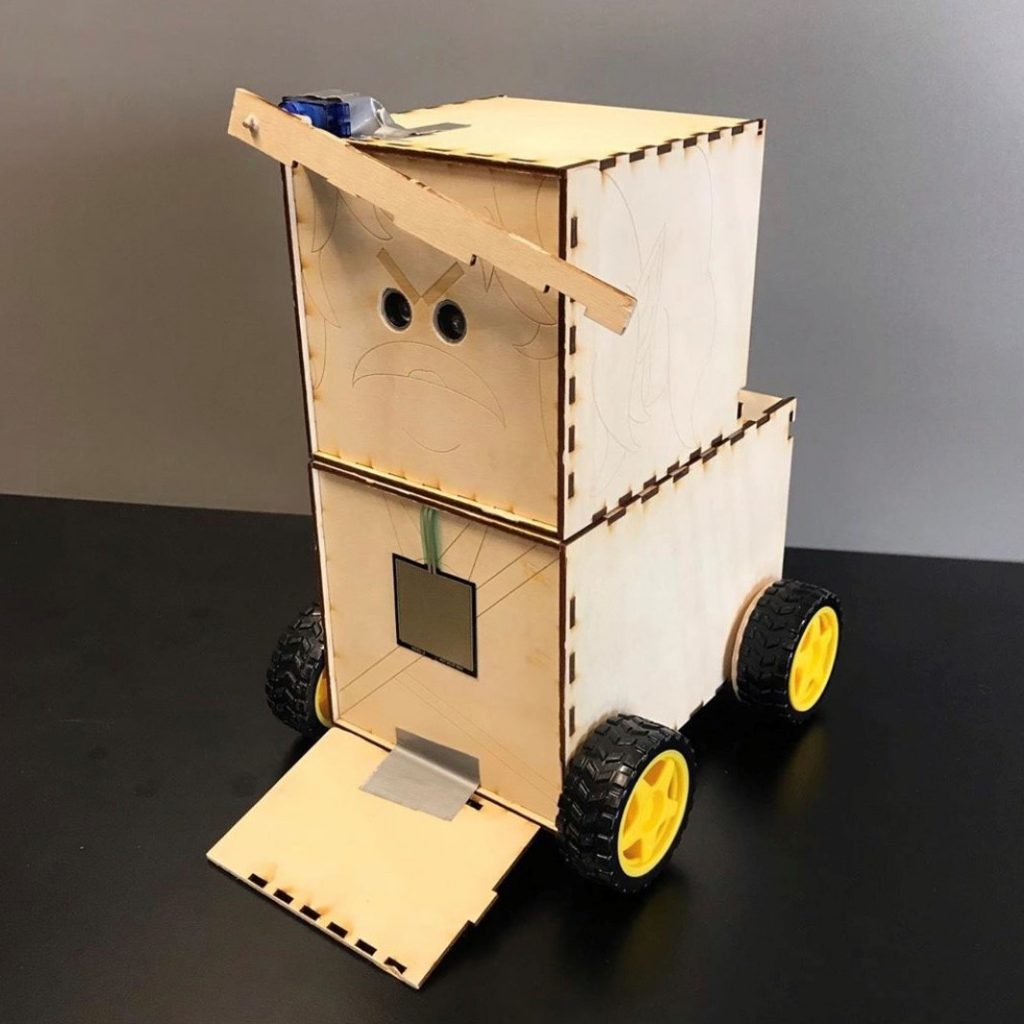
Woensdag zou onze belangrijke dag worden waarop we alles dat we hadden voorbereid zouden combineren en laten werken in onze robot. Hiervoor moesten er ’s ochtends nog wat kleine aanpassingen worden gedaan aan de casing. Hiervoor heb ik meerdere gaten geboord en opzetstukken voor de wielen bedacht en gemaakt waarmee we ze aan de motoren konden klikken. Dit was nog best een klus aangezien ze in het stadslab niet de juiste maat boor hadden waardoor ik een kleinere boor moest gebruiken en daarna de gaten moest uithollen tot ze de juiste grootte hadden. Na dit gedaan te hebben hebben we alles van de casing aan elkaar gelijmd, en konden we beginnen met het installeren van de hardware. Allereerst zorgde in dat de motoren op de juiste plaats zaten en daarna goed vast zaten d.m.v. Duck tape. Max en ik hebben daarna de bedrading goed gekregen wat nog best een goede was omdat we 2 360 graden motoren hadden die we dus d.m.v. twee externe power sources moesten aansluiten. Gelukkig lukte het ons en hierna waren we helemaal klaar voor de robotbattle! Helaas verloren we gelijk in onze eerst battle maar al met al toch een geslaagde dag die een volledig werkend product op heeft geleverd!