
Deze week hebben we de nieuwe opdracht voor deze sprint uitgelegd gekregen; maak met je groepje een smart pushy object met gebruik van alle sensoren die vorige sprint gebruikt zijn. De opdracht leek me eerst wel lastig maar ook wel uitdagend omdat we 4 verschillende sensoren hadden en we voor alle 4 sensoren een toepassing moesten maken. Ook was het tijdsbestek die we hadden voor deze sprint niet heel lang, namelijk 2 CLE weken.
Allereerst zijn we begonnen met het inventariseren welke sensoren we hadden, en gelijk daarna zijn we gaan brainstormen wat voor toepassingen we konden bedenken met deze sensoren. En hebben we nagedacht over het algemene design van de robot. Tijdens het brainstormen heb ik het volgende geschreven:
Brainstorm 14-10-2019
We hebben de volgende 4 sensoren:
-Druksensensor
-Touchsensor
-Geluidssensor
-Afstandssensor
We willen de sensoren op de volgende wijze gebruiken voor onze robot:
Geluidssensor: De geluidssensor word gebruikt om de code te starten. Wanneer de adafruit aan gaat en hij geluid waarneemt begint hij met het uitvoeren van de code.
Afstandssensor: Met de afstandssensor nemen we waar hoe ver de tegenstander van ons verwijderd is. Wanneer dit minder dan bijv. 10cm is stopt de robot met vooruit rijden.
Druksensor: op de voorkant van de robot, om te voelen of er druk is van een tegenstander. Wanneer er druk is van de tegenstander begint onze robot weer vol gas te rijden.
Touchsensor: Van 2 touchsensoren maken we 2 controls waarmee we 2 slagarmen aan de voorkant van de robot laten slaan. Hierdoor kunnen we zelf bepalen of we met de linker of de rechter arm slaan afhankelijk van de oriëntatie van de tegenstander.
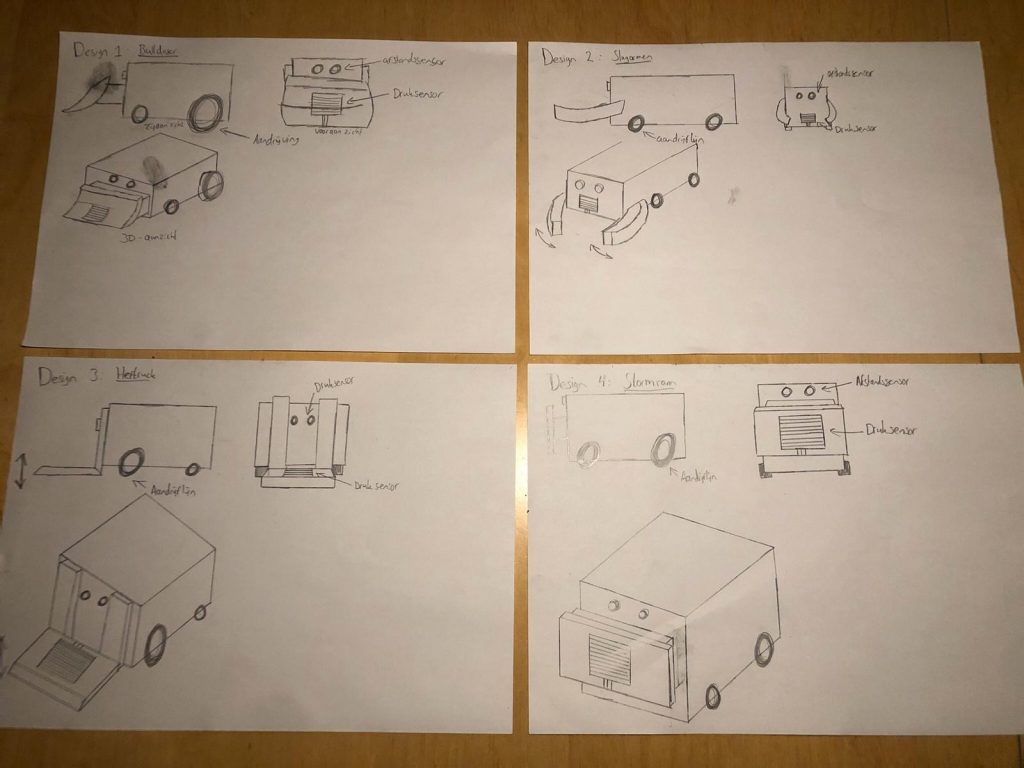
Vervolgens hebben we de taken verdeeld over het team. Hierbij hebben we rekening gehouden met wat mensen wilden doen voor eventuele buildingblocks alsmede wat ze nog nooit gedaan hadden, om zo zoveel mogelijk nieuws te leren. Ik heb daarom het design van de robot op me genomen. Hiervoor heb ik verschillende designs getekend over hoe de robot er eventueel uit zou kunnen komen te zien. De volgende 4 tekeningen zijn mee genomen in onze beslissingen:
Ook heb ik een samenwerkingscontract opgesteld voor deze sprint, en heb deze laten lezen en ondertekenen door de rest van het groepje. Deze is hier te lezen.
Ook ben ik eind week 42 samen met een heel aantal klasgenoten naar DreamHack gegaan, de blog post hierover is hier te lezen.