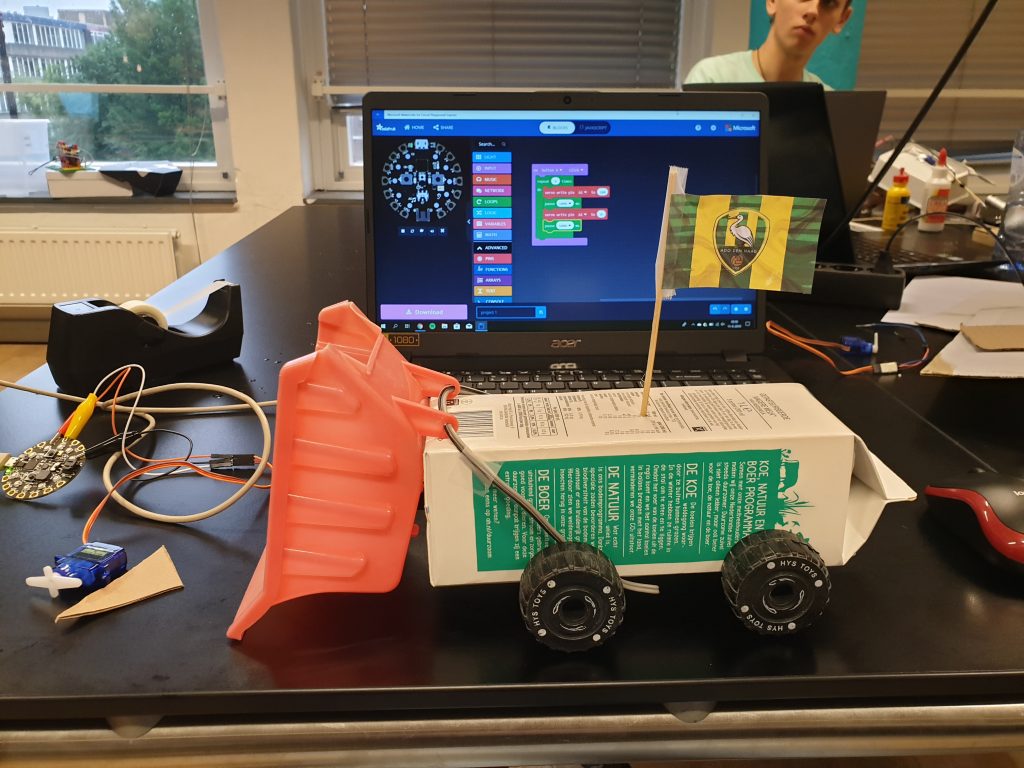
Ik had het ontwerp voor mijn robot bedacht (zie foto) en al het materiaal verzameld thuis. Ik had het idee om met de servomotor de robot naar voren te duwen als het ware, want de wieltjes zouden dan verder voor de beweging zorgen. Na er 4 uur over te hebben nagedacht en aan gewerkt te hebben, lukte dit mij helaas echt niet. Het was frustrerend want ik had een mooi beeld voor me hoe mijn robot zou moeten werken. Ik had later nog aan peercoaches en een docent om hulp gevraagd, maar mijn idee was uiteindelijk te moeilijk om uit werken met zo’n kleine servomotor (ik had bovendien ook alleen de 180 graden versie, niet de 360 graden versie). Ik heb hier wel van geleerd dat ik eerder vragen moet stellen, want ik was een hoop tijd kwijt door het zelf de hele tijd te proberen te laten werken. Ik moest hier dus uiteindelijk een alternatief op verzinnen, en het enige wat ik kon bedenken dat mij zou lukken om te kunnen maken, was het ADO-vlaggetje heen en weer laten zwaaien m.b.v. het servomotortje. Het deed verder niks in the battle, ik verloor dus ook helaas gelijk in de 1e ronde van Reymark, maar ik voldeed in ieder geval aan de eisen, iets van de robot laten bewegen d.m.v. de servomotor en de arduino. Ik heb ook voor het eerst een korte pitch gegeven over mijn robot, hierover kun je meer lezen in het Pitch Perfect Building Block.
0 reacties