Ik heb in beide projecten gewerkt met de Circuit Playground. De opdracht van de pushy robot was: om een robot te maken die bewoog. Het moet een andere robot buiten de lijn proberen te krijgen door middel van het bewegen. Er moest ook een herkenningspunt van jezelf in zitten. Ik heb mijn robot de naam Schuifduivel gegeven.
De opdracht van smart object was voor mijn/binnen mijn groepje om het Belasting en Douane museum een aantal problemen op te lossen. Mijn probleem was om een saaie glazen kast leuker maken/ hem meer te laten opvallen.
Hieronder staan knoppen naar mijn sprints waarin ik de opdrachten heb gedaan.
Kleine opmerking ik ben extreem dyslectisch dus als er zinnen niet helemaal kloppen of er zitten spel fouten is, Sorry!
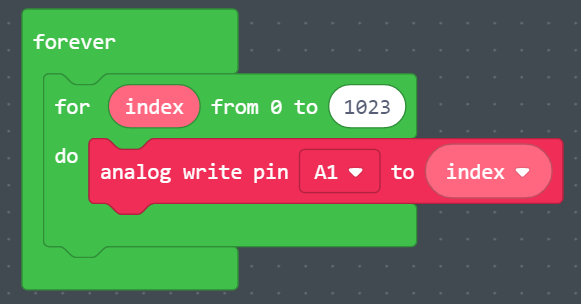
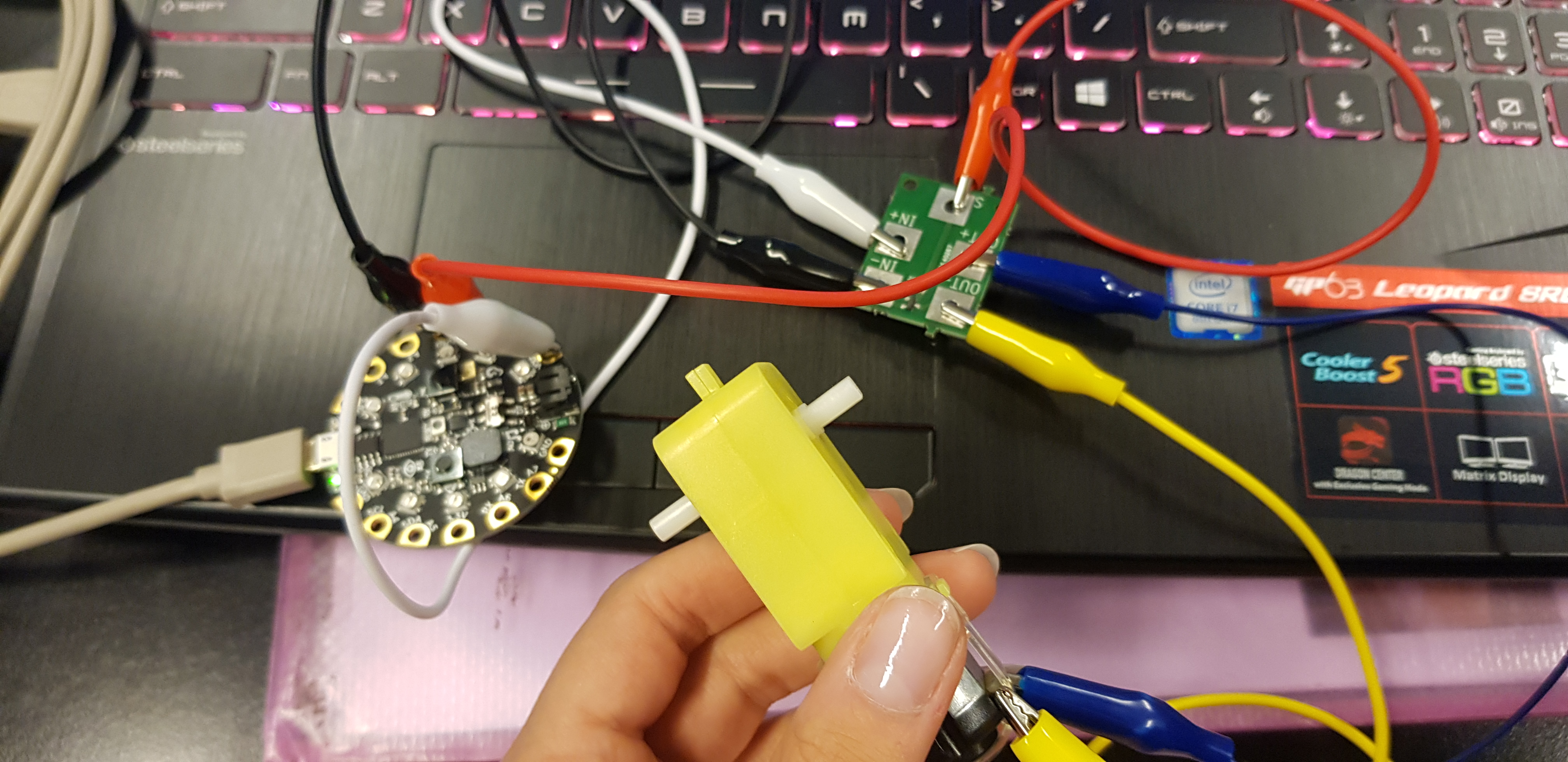
Schuifduivel: Ik heb met mijn AdaFruit een servo (gele as moter noem ik hem altijd maar) mijn robot laten rijden. hiervoor heb ik de site https://makecode.adafruit.com/ gebruikt. Ik heb de code geleerd van de speedcourse van David. Om dit motertje aan te sluiten hadden we het groene bordje nodig ook wel mosfet genoemd. Om mijn Robot te laten rijden had ik wel stroom nodig. gelukkig had ik een kleine powerbank die genoeg stroom leverde voor mijn servo en adafruit. Wanneer ik de powerbank aanzetten begon de servo de draaien.
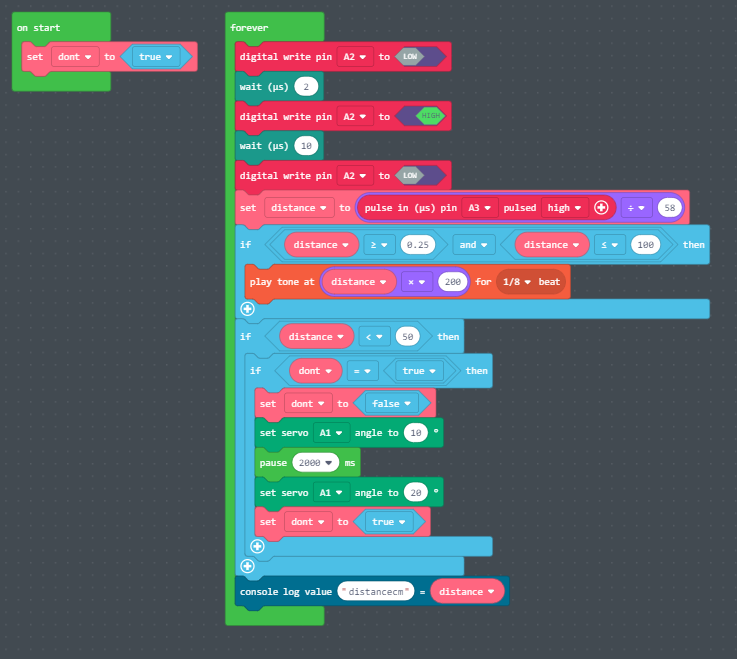
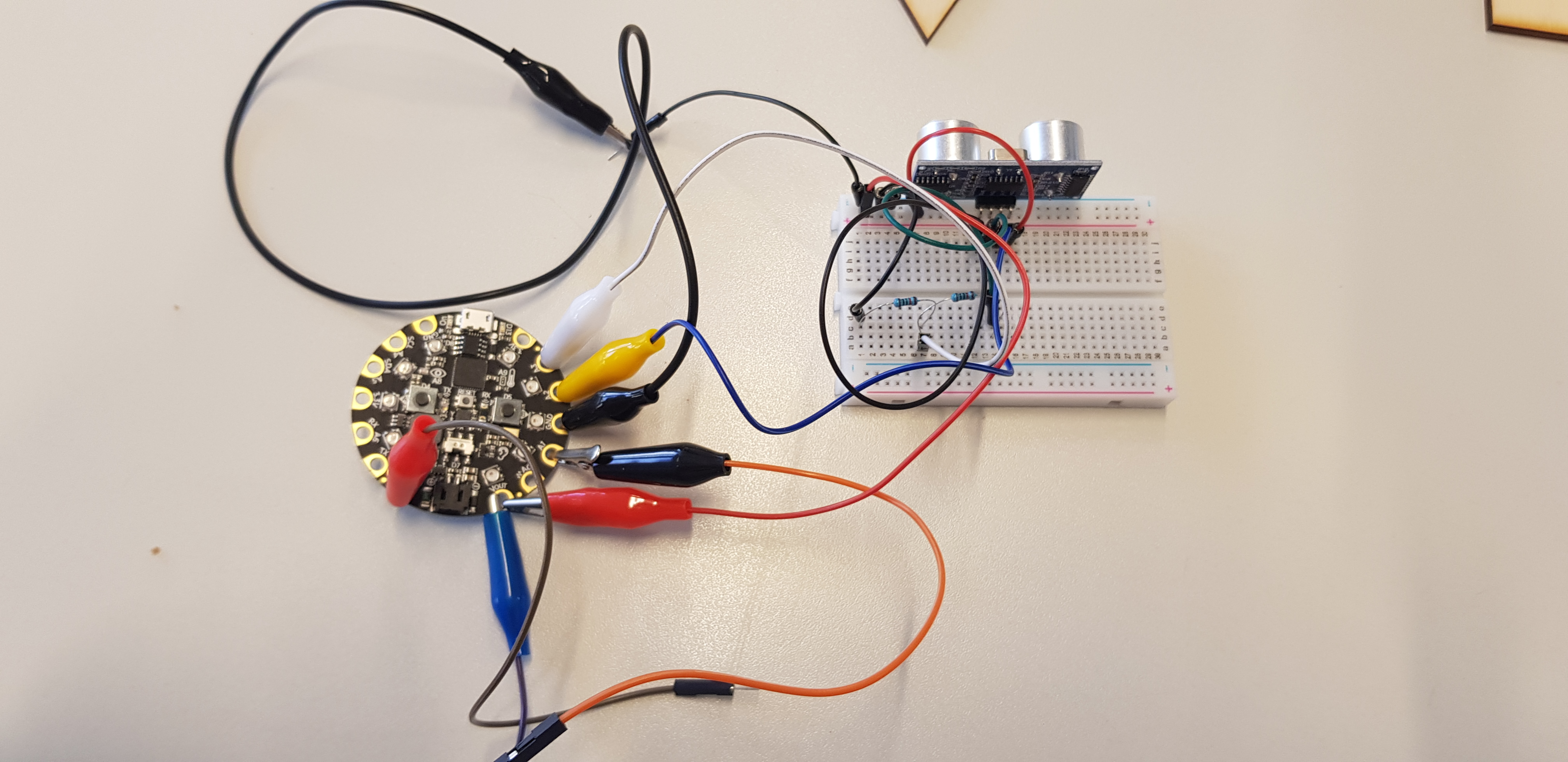
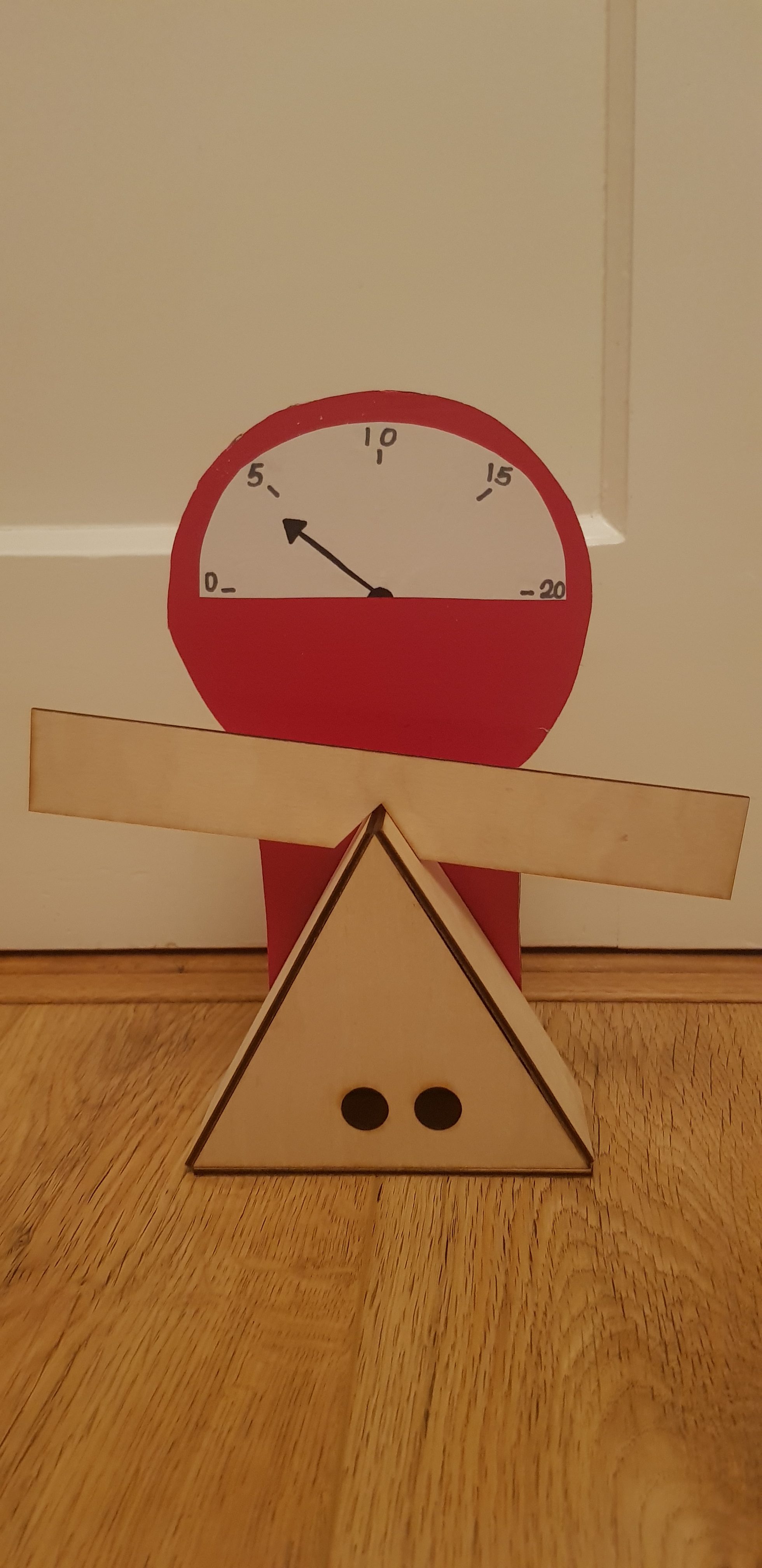
Scheve weegschaal: Ik heb met dit project een ultrasonic sensor en een 180 graden servo gebruikt. Deze twee moesten samen werken met elkaar. Als de sensor iets in de buurt ziet komen van de weegschaal gaat hij de servo laten kantelen. Na het naar 1 kant kantelen moest hij wel weer terug anders doet hij het 1 keer en nooit meer. Na 2000ms gaat hij weer netjes terug. Nadat hij terug gegaan is kan hij weer opnieuw kanten tot dat mijn powerbank leeg is. Ik heb beide codes gemaakt met de blokken en met behulp van internet en klas genoten.
Schuifduivel: Bij mijn robot heb ik een gele as moter gebruikt. Deze had alleen een extra bordje nodig, mosfet. Het mosfet bordje had ik nodig omdat plat gezegd maar alleen een plus en min aan het motertje zat en de adafruit ook nog een signaal uitzend. Hiervoor moest ik natuurlijk de plus/min van de adafruit en het motertje conecten. Op het uit einde, de rode draad, heb ik de signaal gedaan dus wanneer een signaal door gaat geeft het bordje ook de stroom door waardoor hij gaat werken.
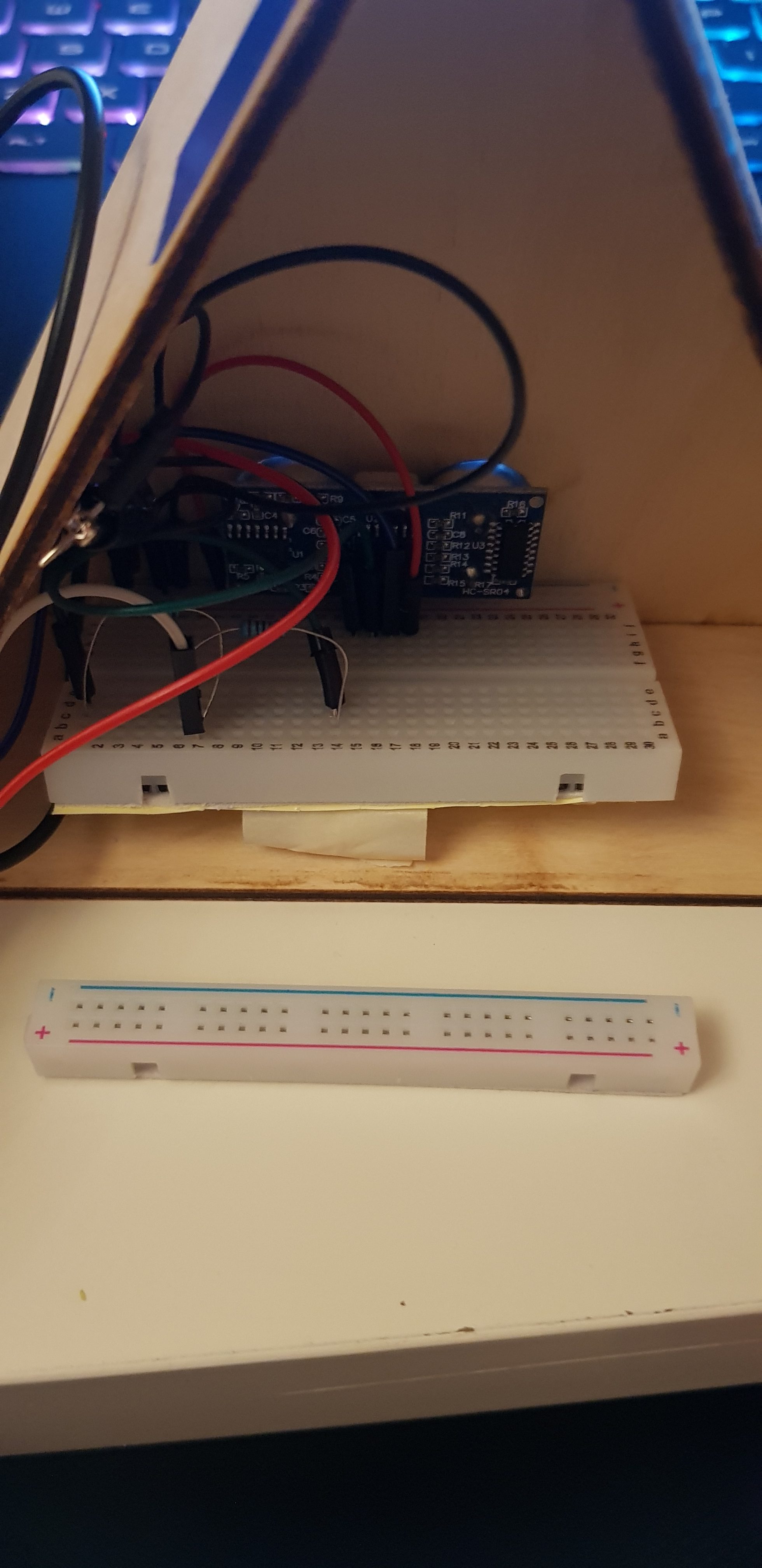
Scheve weegschaal: Bij mijn weegschaal heb ik een 180 graden servo gebruikt en daarbij heb ik ook een ultrasonic sensor gebruikt. Ik heb gezorgd dat de adafruit een geluid maakt als er iets in de buurt komt van de sensor. Hierdoor wist ik of de sensor werkt en wanneer de sensor iets zag. Als ik wel geluid hoorde maar mijn servo deed niks dan wist ik dat het aan de servo lag en niet aan de sensor. Het was best wel een dingetje om ze samen aan te sluiten. Ik had nog nooit eerder met een breadbord gewerkt en snapte er ook in het begin niks van. Gelukkig kreeg ik veel hulp van klas genoten en snap ik nu waar de letters en cijfers voor staan. Het is eigenlijk letterlijk een schakeling maken met weerstandjes, serie en parallel. Toen het werkte was ik best wel trots op mijzelf. daarna moest ik de goede hoek vinden die mijn weegschaal maakte. Gelukkig kon ik dit zo afmeten.
Bruikbaar product
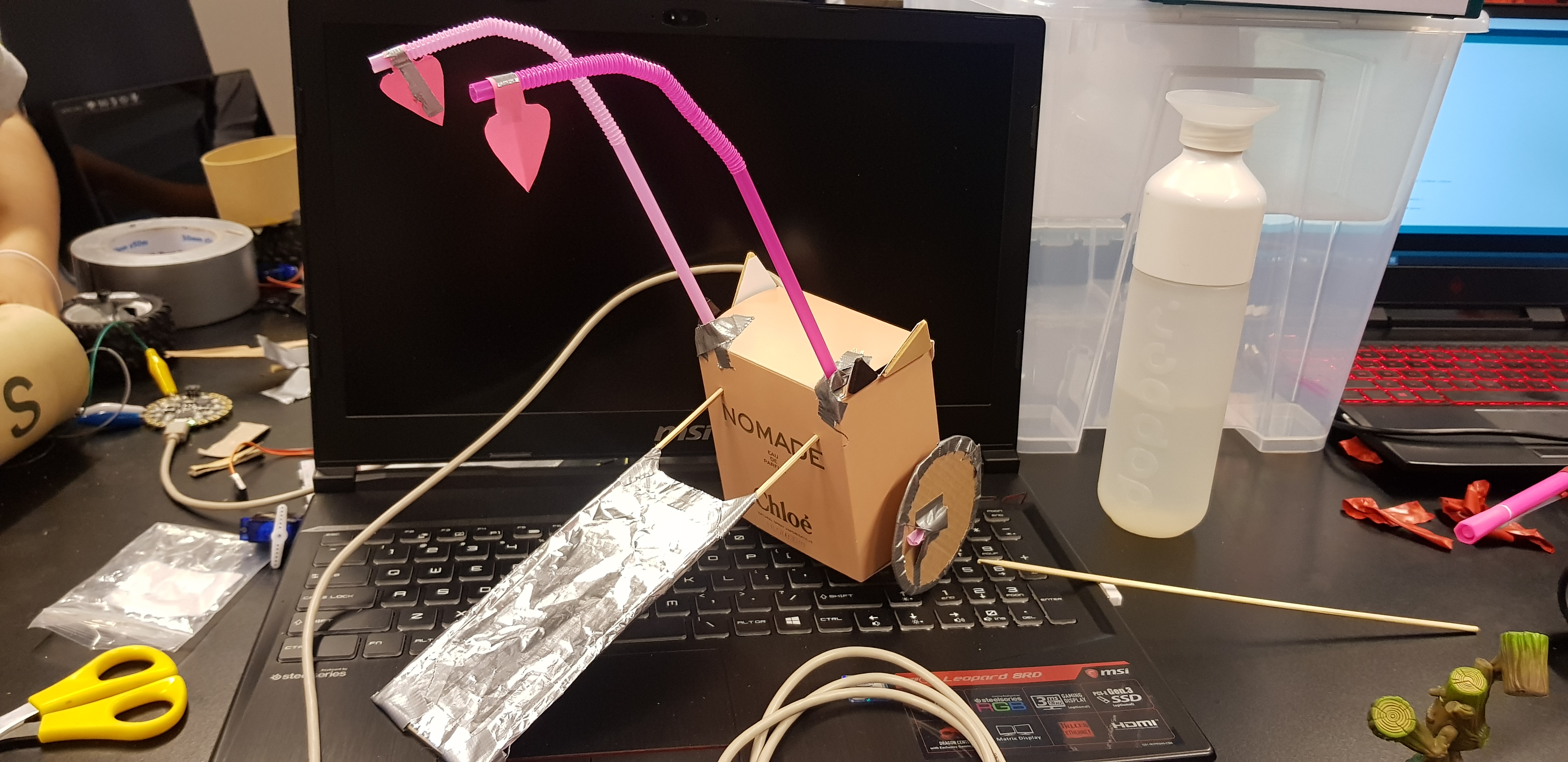
Schuifduivel: Ik had een parfum doosje gebruikt en zonder dat ik het wist paste daar de gele as servo en de adafruit in. Als ik wilde dat de powerbank er in paste kon dat ook nog. Het moment van de battle heb ik wel de powerbank er uit gehaald omdat ik hem zo makkelijker kon aanzetten. Er kwam wel zomaar een voordeel bij want de kabel die ik gebruikte was heel lang dus de robot had daar geen last van. De wielen waren wel een verbeter puntje, ik had verwacht dat we op school wielen zouden krijgen maar helaas. Dus ik heb wielen gemaakt van een rietje en karton het was niet de beste combinatie maar het werkte wel. De schans heb ik expres van aluminium folie gemaakt want dat is super dun en licht. Het was dan ook de bedoeling dat het onder andere robots kwam en ze licht optilde en zo buiten het vak zou dragen.
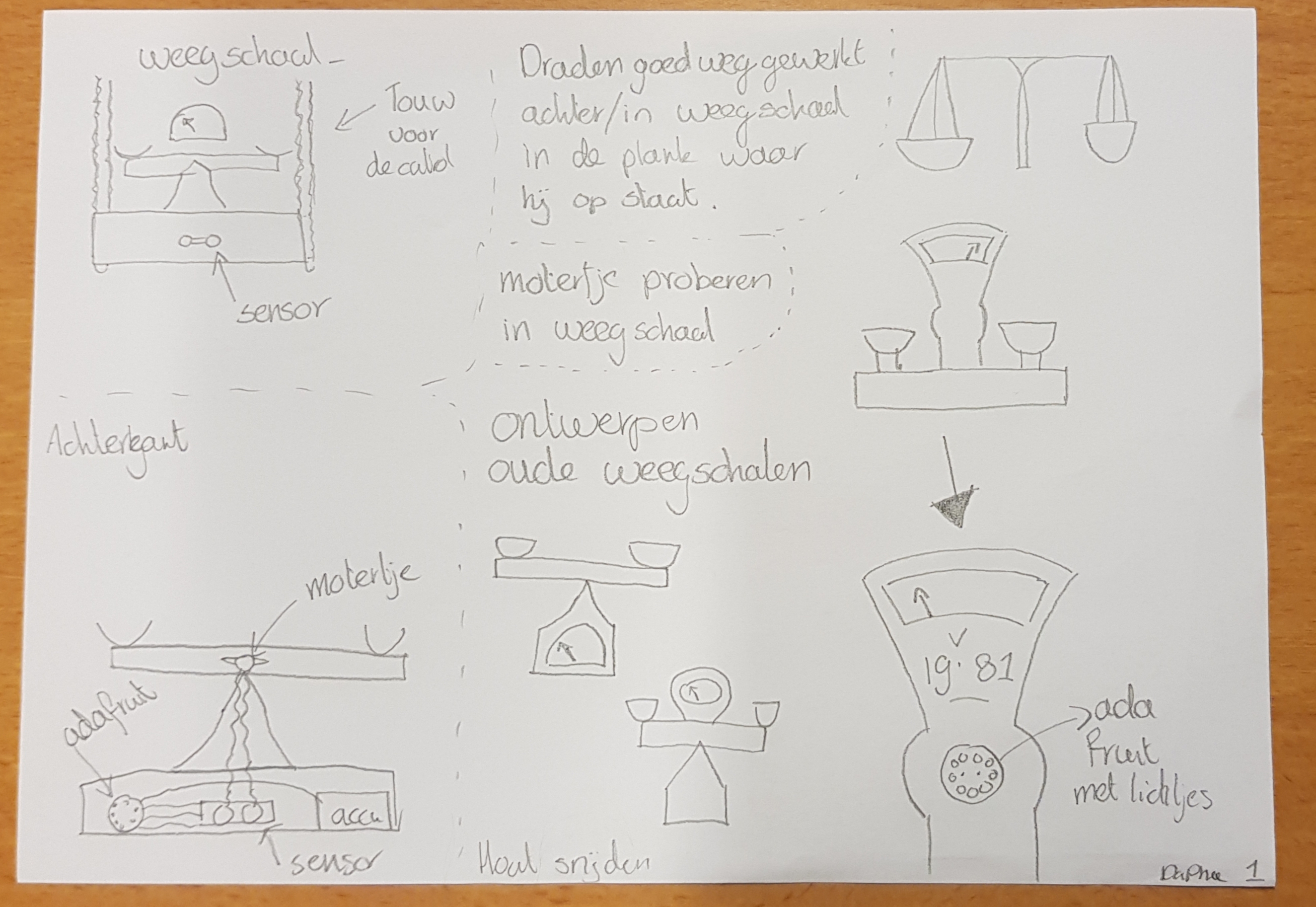
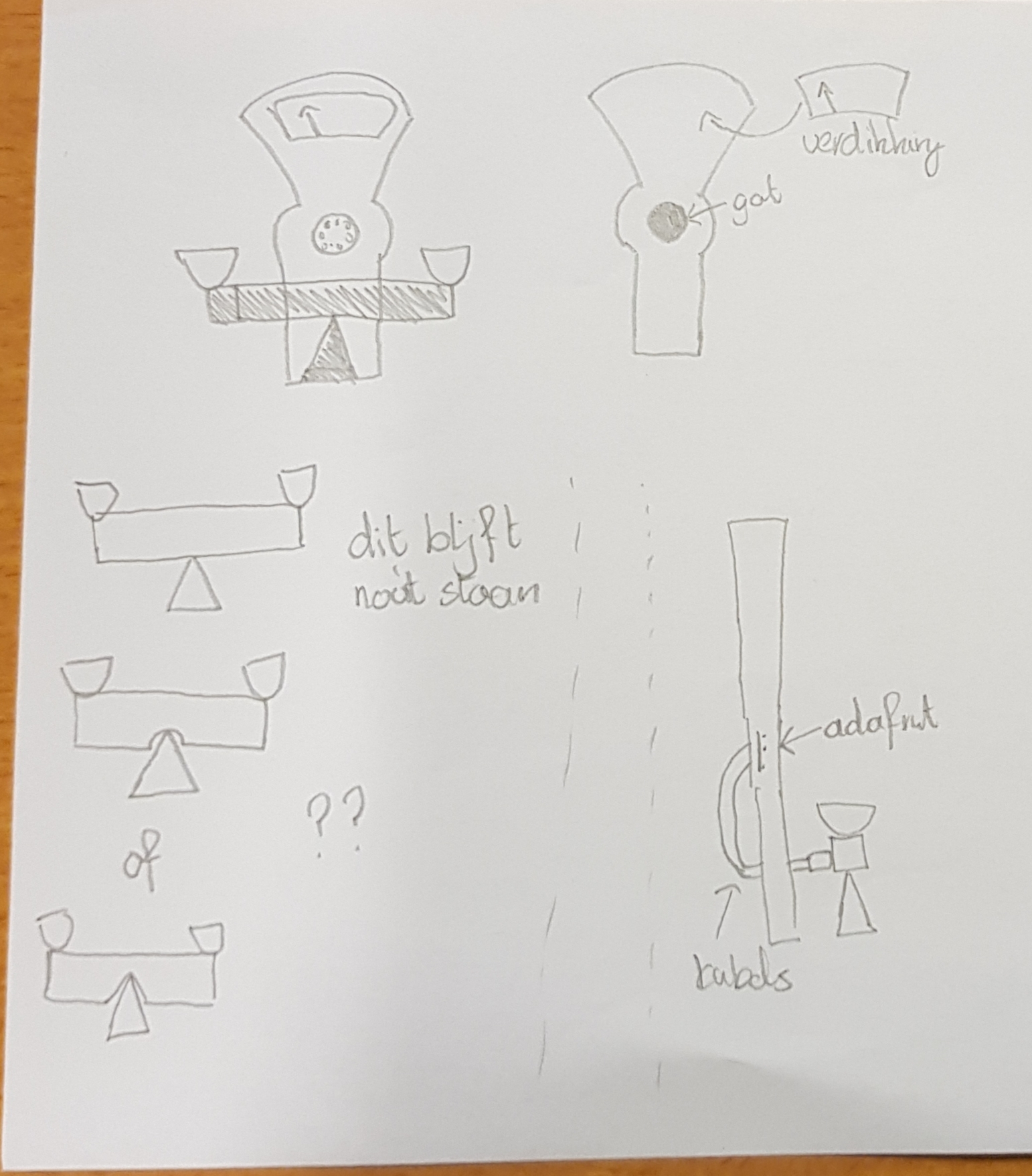
Scheve weegschaal: Voor mijn weegschaal wilde ik dat alles er inpaste en alles goed weg gewerkt zou worden. ik had een aantal schetsen gemaakt en daar kwam ik al snel achter dat het best lastig ging worden. Ik had nog nooit hout gesneden en ook niet met Illustrator gewerkt. Omdat ik geen simpel doosje wilde zoals alle andere mensen heb ik zelf op Illustrator mijn case moeten maken. Marlours gaf mij als tip om nog niet met fingerslots te werken omdat dat nog erg lastig was als je net begint. Dit advies heb ik dan ook opgevolgd. Na dat ik mijn driehoekje gesneden had kwam ik er achter dat hij eigenlijk te klein was maar gelukkig kon ik mijn breadbord kleiner maken. Alles paste gelukkig precies. Op de dag zelf heb ik dan ook dicht geplakt met hout lijm en mijn powerbank aangezet. Mijn servo die het ‘weeg gedeelte’ moest laten bewegen kon natuurlijk niet in de driehoek want dat was ook niet de bedoeling. Die heb ik op de achterkant geplakt net boven mijn driehoek. Omdat mijn powerbank al aanstond en nog even moest oefenen voor mijn pitch, liepen er wel steeds mensen langs. Het leuke was dat hij er op reageerde en mensen ook echt omkeken en dat was PRECIES de bedoeling!
Vond het trouwens wel leuk om ze beide roze te maken omdat dat bij mij past. Vind het ook belangrijk dat ik gelijk kan herkennen ‘oh ja dat heb ik gemaakt, typisch Daphne weer’