OP 30 November is er een begin gemaakt aan de schakelingen waarmee de Arduino de D/C motor en servo motor zal besturen. Eerst begon ik aan de transistor schakeling met D/C motor. Op de Arduino website werd er goed uitgelegd hoe het zou moeten werken en om extra kennis te verwerven heb ik wikipedia bezocht over transistoren. Dus toen ik begreep wat ik moest doen keek ik naar deze schema
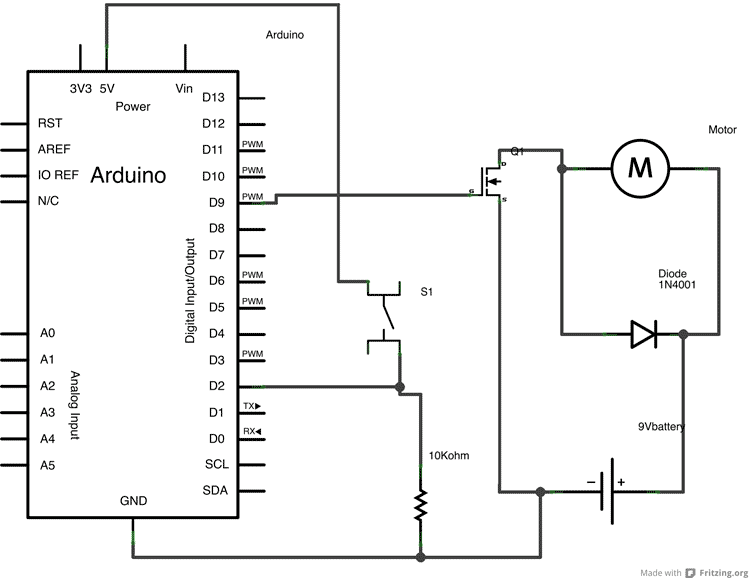
Na wat trial and error was het gelukt met deze schakeling kon de D/C motor aan en uit gezet worden.
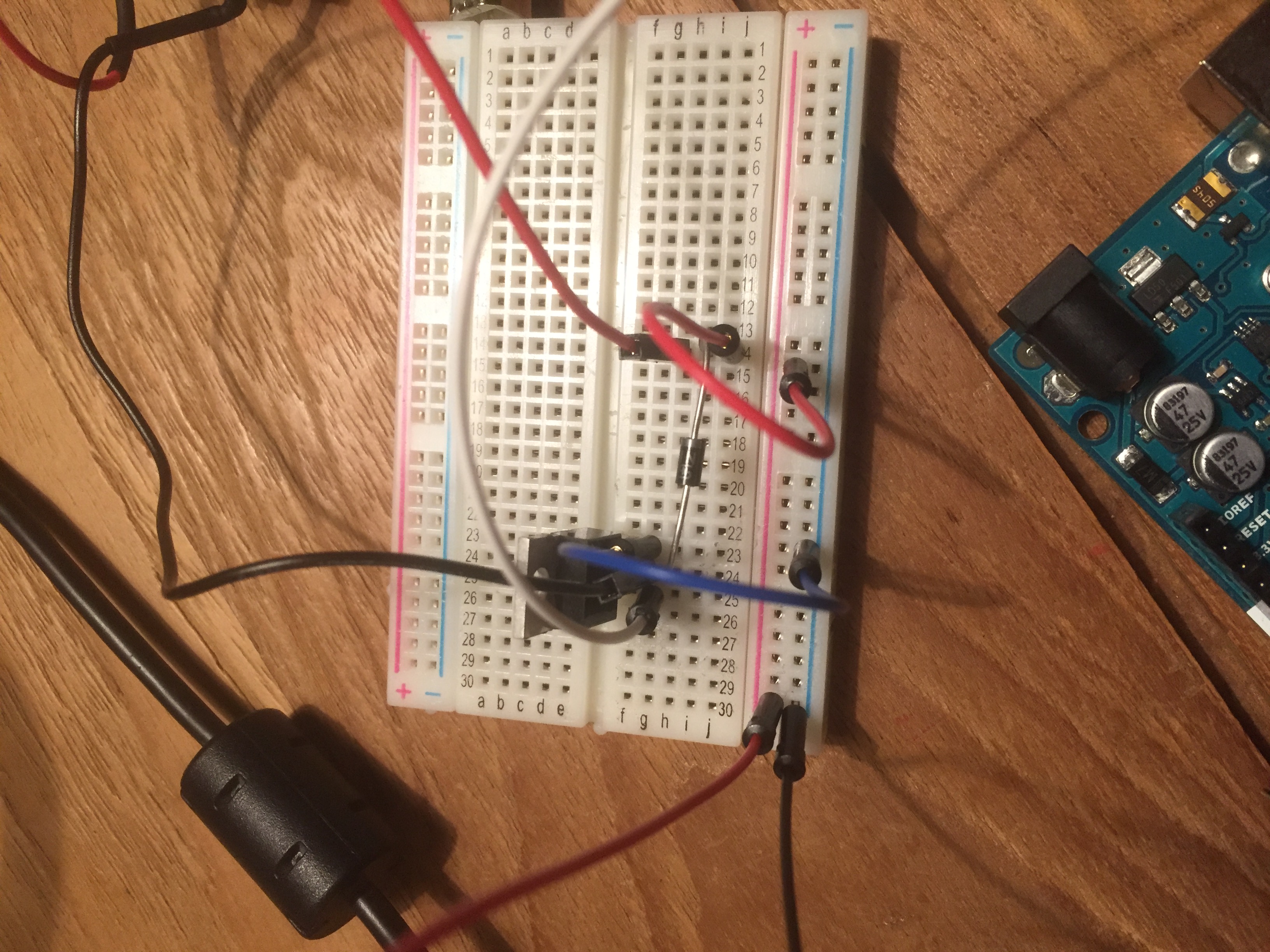
In deze video is te zien dat de D/C motor kan versnellen en afremmen.
Daarna was de Servo Motor aan de beurt, het was veel makkelijker dan de D/C motor want ik hoefde geen ingewikkelde schakeling te verzorgen. Binnen een paar minuten begrepen ik hoe de servo moest programmeren en was ik snel klaar met testen.