In de afgelopen weken/maanden hebben we hard gewerkt aan ons product. Tijdens dit proces zijn een aantal dingen opvallend, die ervoor gezorgd hebben dat we nu staan waar we staan. Er zijn enkele veranderingen zichtbaar, terugkijkend op TLE1 en 2. Welke dat zijn en hoe dat invloed heeft gehad op ons en ons product, zal ik hieronder vertellen.
Hoe werkten wij in het begin vs. nu?
In het begin, bij het vinden van een probleemstelling en het uitwerken hiervan, werkten wij vrij veel samen aan hetzelfde. Ook bij het verder uitdiepen van het concept hadden we nog niet echt per teamlid onze eigen focus. Dit zorgde ervoor dat we bepaalde veranderingen, zoals de switch van hardware naar interactie, moeilijker op konden pakken. We sprongen als team van taak naar taak, i.p.v. als teamlid.
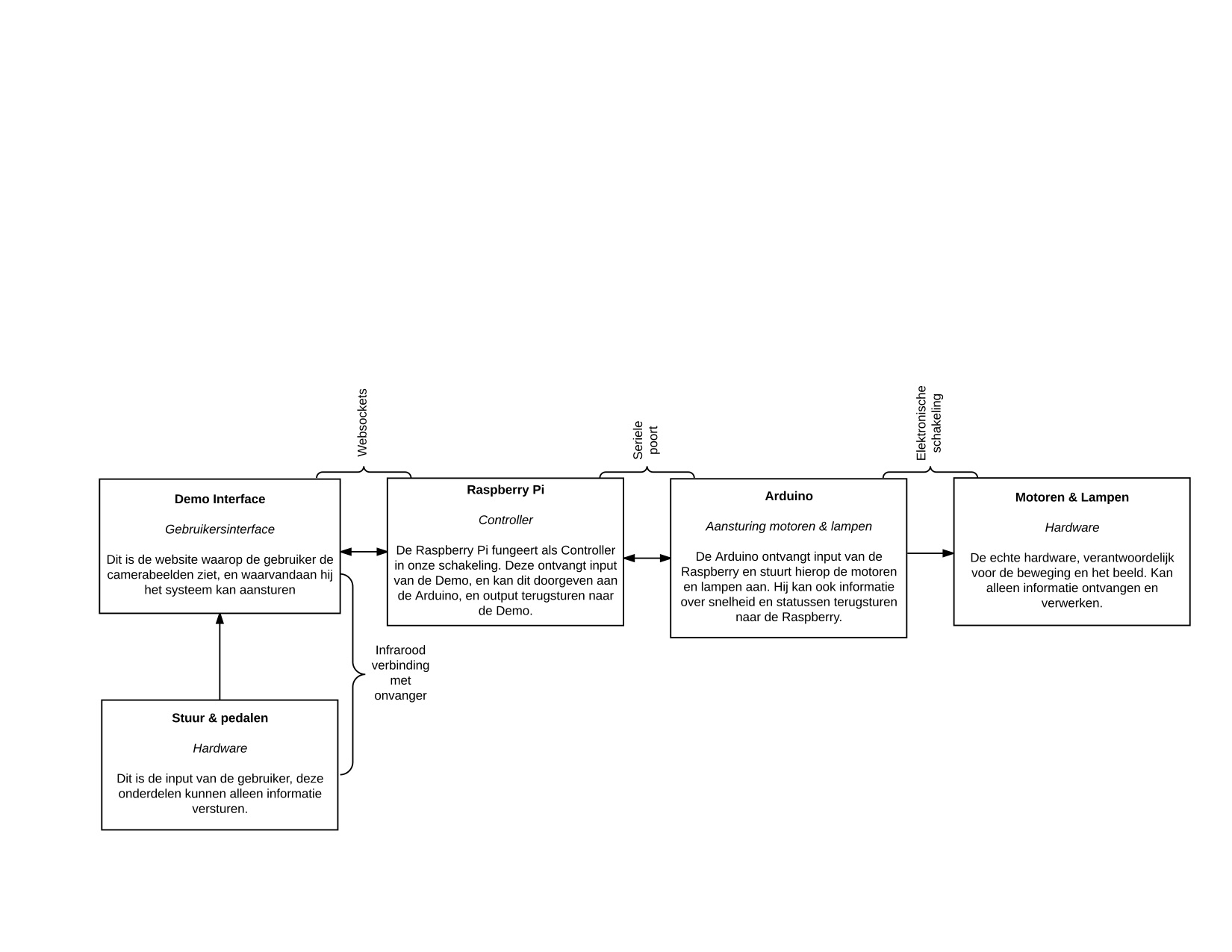
Sinds dat we met het echte ontwikkelproces begonnen, dus zeg begin TLE2, werden voor ons de onderlingen vaardigheden van ieder teamlid beter duidelijk. Ons uiteindelijke product werd ook voor ons duidelijker en we konden verder vooruit kijken. Hierdoor konden we meer taken in parallel oppakken en onderling verdelen. Zo was Carlo vaak in de werkplaats te vinden om ‘hands-on’ aan de auto te werken, was ik veel met de interface bezig en werkte Jeremy veel aan de Arduino.
Doordat we vanaf TLE2 ook weer meer met Daily Stand-Ups werkte, konden we elkaar beter op de hoogte brengen van waar we mee bezig waren, en elkaar vervolgens op beter hierin loslaten. Zo hield iedereen een breed overzicht van het project, maar had iedereen zijn eigen diepe focus van zijn onderdeel. We konden elkaar dus zeker wel helpen en van inzichten voorzien, maar iedereen wist 100% alles van zijn onderdeel. Ons project werd ook vrij snel vrij complex, met meerdere uitgediepte stukken naast elkaar, dus dan is het ook fijn om die vlakken te verdelen. Als wij alle drie alles 100% moesten weten van alle onderdelen, zouden we lang niet zo snel kunnen werken.
Het gevaar van onze projectkeuze
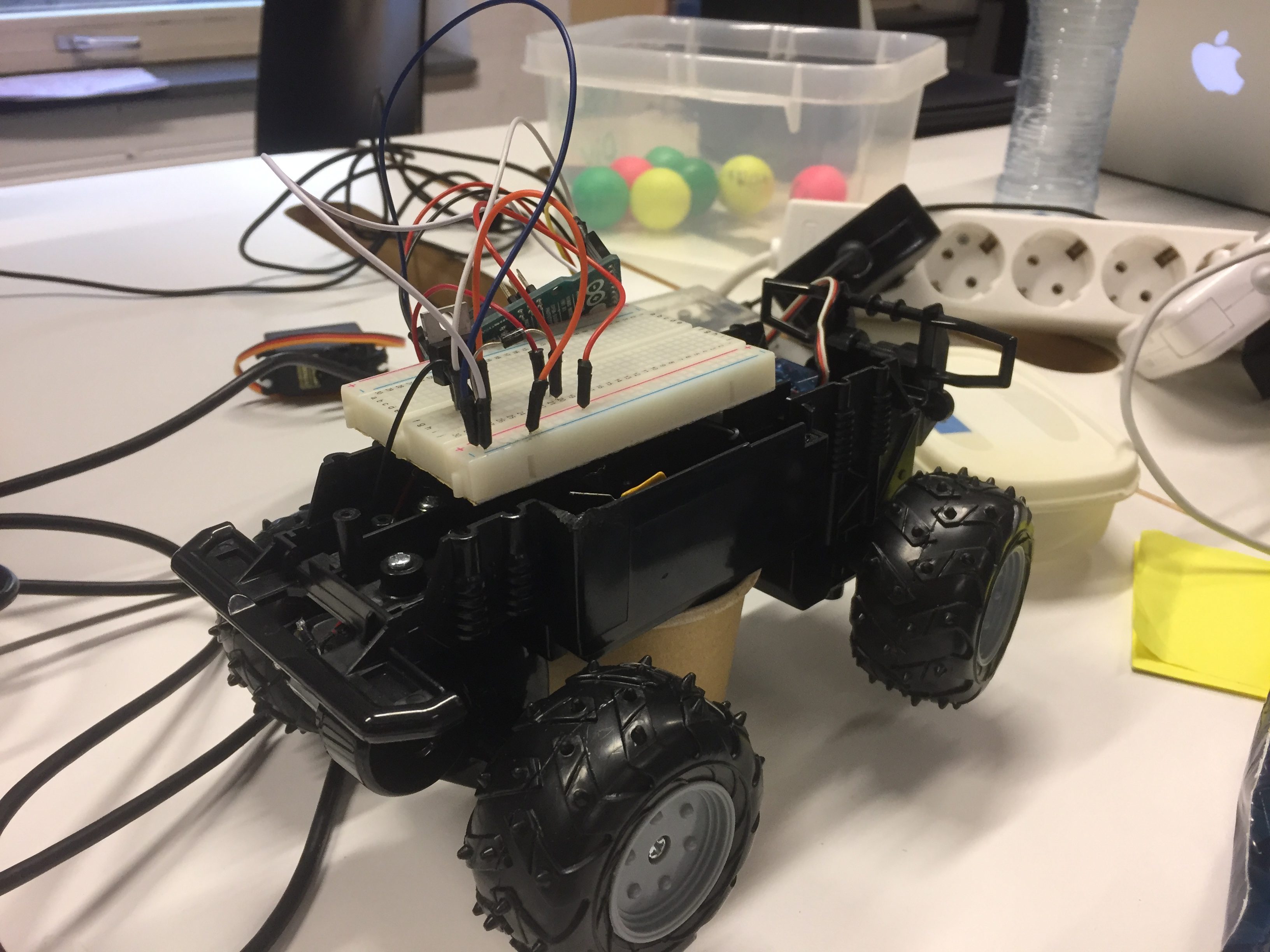
Wij hebben een gedurfd onderwerp gekozen, wat ook aan de rand van ons vakgebied licht. Wij vinden dit erg mooi, omdat wij zo kunnen laten zien dat je meer kan met de bestaande techniek dan dat je eerst zou denken. Wij hebben erg veel geleerd, van zowel de hardware (Raspberry Pi) als nieuwe programmeertalen (Python) en de interactie hiermee naar websites en Arduino.
Wij hebben wel meerdere keren gemerkt dat er ook keerzijdes zitten aan onze keuze. Zo miste we in het begin de nadruk op de interactie, dit kwam doordat we teveel met de hardware bezig waren, maar ook omdat we met de hardware een soort opstartfase door moesten, voordat we er iets visueels van konden maken. Achteraf hadden we dit kunnen voorzien en op kunnen vangen, maar we moesten nu snel switchen tijdens het project.
Ook omdat we het vooral erg leuk vinden om met de hardware te werken, en hier van alles aan te koppelen, wijken we soms af van het eigenlijke doel (volgens de sprint criteria). Een meer visueel gerichte oplossing, zoals een game, past nou eenmaal beter in dat plaatje, dus wij moeten daar extra goed naar kijken. Dit blijkt lastiger dan het lijkt, omdat we veel uren kwijt waren aan het werken aan ‘ondersteunende’ onderdelen, zoals de motoren, stroomtoevoer en de camera. Des te gaver als het uiteindelijk allemaal werkt, en dit houdt ons ook op de been, maar we merken wel dat het lastig is om het in het vormpje van de sprint te gieten.